广义物理与计算理论
比方说,我们找到了一条再现物理学的规则。一个大问题是:“为什么是这条规则,而不是另一条?”非常优雅的潜在答案对于这个问题,我们用的是我们所说的规则空间相对性-这从本质上说,并不是只有一条规则:实际上,所有可能的规则都在使用,但我们基本上选择了一个参考框架,使我们能够将看到的东西归因于某个特定的规则。换言之,我们对宇宙的描述是我们自己创造的,可能有许多其他潜在的完全不相干的描述,等等。
但这在更正式的层面上是如何运作的呢?本公告将探讨一个非常简单的案例。在这样做的过程中,我们将发现,我们正在探索的内容不仅与“广义物理”问题潜在相关,还与计算理论中的基本问题潜在相关。本质上,我们将要做的是研究通过应用所有可能的规则创建的空间的结构,例如,潜在地允许我们将可能的算法及其应用程序的空间“几何化”。
在我们的物理模型中,我们首先考虑空间超图描述“空间原子”之间的关系。然后,查看给定规则更新这些超图的所有可能方式,我们形成一个多路图。此图的横截线定义了我们所称的鳃间隙,其中我们可以看到量子态之间的纠缠模式。
但我们还可以考虑第三个层面。我们不只是形成一个多路图,在其中我们用给定的规则进行所有可能的更新,而是形成一个规则多路(或“超多路”)图,在其中我们不仅遵循所有可能的更新,而且遵循所有可能的规则。这个规则多向图的横截定义了我们所称的规则空间。因果不变性在rulial多向图中,则意味着“规则空间相对性”,这允许我们使用不同的可能参考框架来描述宇宙。
最后计算等效原理表示规则多路图的极限结构具有一定的不变性,与可能规则集的特定参数化无关。但为了理解规则空间和规则多路图,并获得关于这些的直觉,本公告将研究一组特定的可能规则,定义如下简单图灵机.
我们将使用的规则并不适合描述我们的宇宙。但它们结构的相对简单性将有助于我们试图阐明规则空间的一些复杂性。此外,使用图灵机将使我们更容易接触到计算理论,其中图灵机是标准模型。
图灵机器
这是一个特定规则的表示2状态(秒=2),双色(k个=2)图灵机:
指针表示图灵机器的“头部”,其方向表示头部的状态。以下是这台特殊的图灵机器在从“空白带”(即所有方块为白色)开始的几个步骤中所做的工作:
有(2个平方公里)sk公司可能的秒-状态k个-彩色图灵机,或4096秒 = 2,k个=2台机器。以下是这些4096台机器中发生的所有不同行为(从空白磁带开始,一直到左右反射):
但请注意,所有这些都是确定性的图灵机,从这个意义上讲,对于给定的机器,在每一步都应用相同的规则。但是怎么办非确定性图灵机? 这里的想法是在任何给定的步骤中允许几个不同的规则。
举一个简单的例子,考虑这对规则:
为了显示可能的进化历史,我们可以构建一个多路系统:
每个箭头代表两个可能规则之一的应用。非确定性图灵机器通常被认为遵循特定的路径,对应于特定的进化历史。然后一个典型的问题是,是否存在导致特定最终状态的路径(这可能被视为某些特定问题的解决方案)。(在量子图灵机,我们考虑多个状态的集合,视为处于量子叠加中。)
在我们将要在这里做的事情中,我们想研究非确定性的“极端情况”——在这里的每一步,每一个可能的图灵机规则(至少在给定的秒,k个)已应用。然后我们将对创建的完整规则多路图感兴趣。
规则多路图
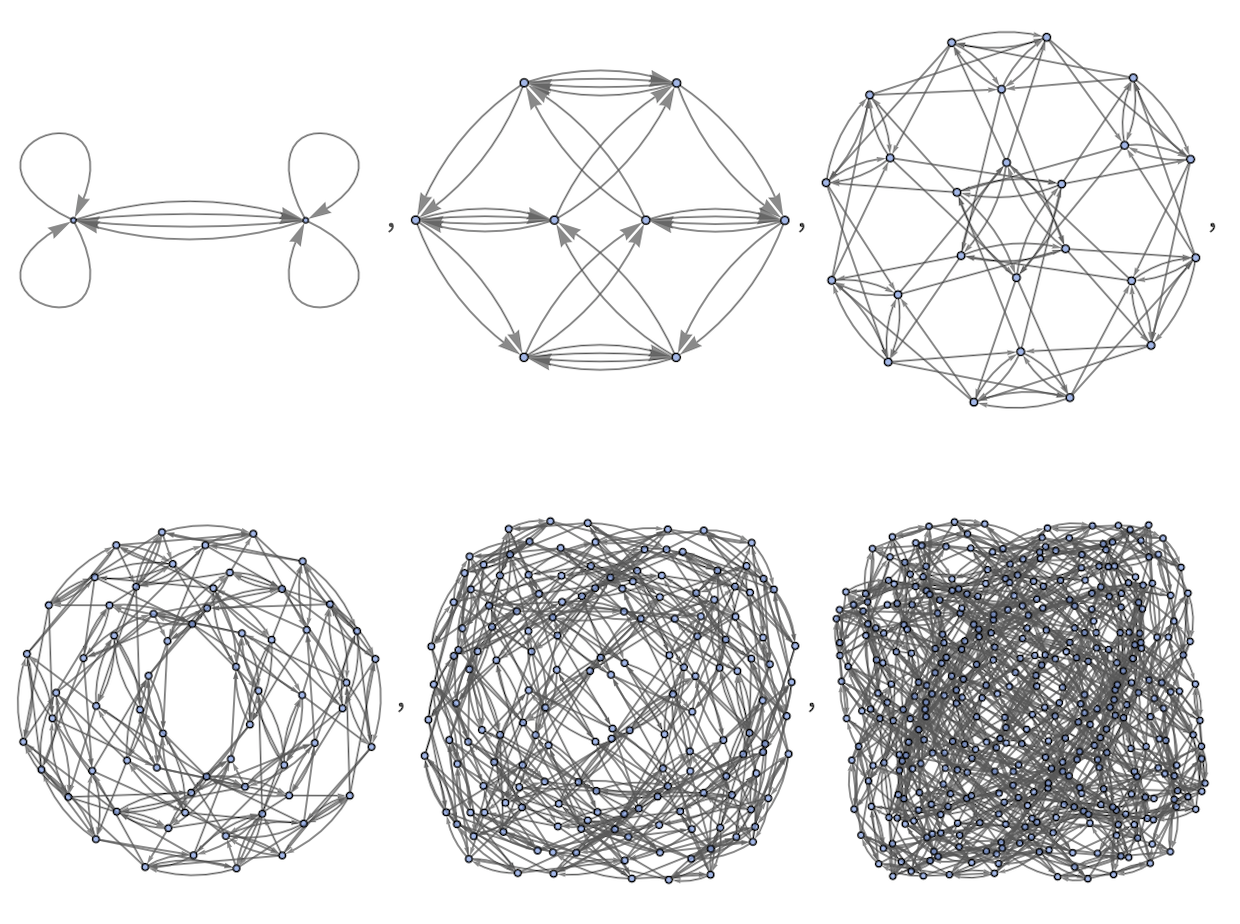
从空白磁带开始。然后应用所有可能的2,2图灵机规则。这是经过1步后形成的规则多路图:
这里的每个箭头代表了上面讨论的所有4096中的许多可能规则。以下是两个步骤后的结果:
在分层形式中,这变成:
在创建这些规则的多路图时,我们可以进行一个重要的简化。我们不需要在每个步骤中将所有4096 2,2图灵机规则分别应用于每个状态,因为重要的是规则中与特定状态相关的一种情况。有4种可能的个案,每种个案都有8种可能的结果,导致32种“微观规则”:
经过3步,规则多路图的形式如下:
在3D中,它变为:
分层形式为:
经过5个步骤后,规则多路图为:
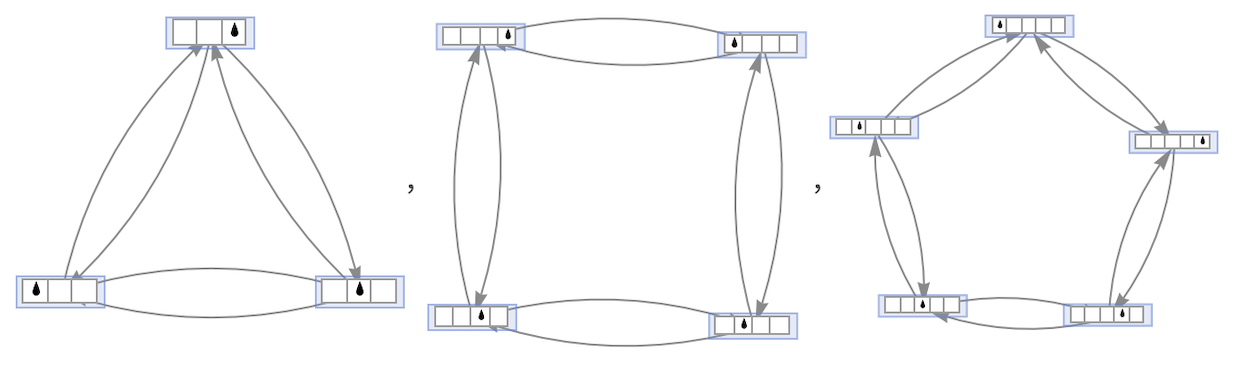
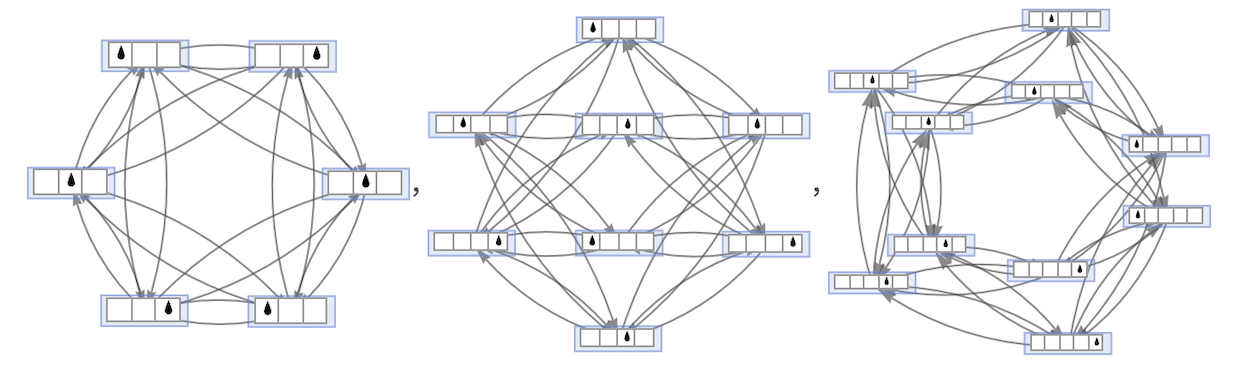
其他状态和颜色的数量呢?以下是图灵机经过3个步骤后的规则多路图,图灵机具有不同的状态数和颜色 :
:
请注意秒=1个示例。即使只有一个可能的国家,也已经有可能形成一个非平凡的多途径规则体系。以下是的结果k个1步后=2:
2个步骤:
6个步骤:
原则上,我们还可以考虑更简单的情况秒 = k个 = 1. 经过一个步骤后,可以得到:
经过两个步骤后,它将变为:
三步之后:
作为分层图形渲染,这将变成:
使用秒 = 2,k个=1个步骤后得到1个:
经过两个步骤后,它将变为:
三步之后:
经过6个步骤后,这将变为:
至少在这个图的中心部分,有两个方向的边。将这些结合起来,并将该图视为无向图,可以得到:
有3种状态(秒=3)共有3条轨道:
人们还可以考虑图灵机器,其中头部不仅可以向左或向右移动,还可以保持静止。在这种情况下,使用秒 = 2,k个=1个步骤后得到1个:
经过两个步骤后,它将变为:
经过4个步骤,去除重复的边等,这样可以得到:
作为另一种概括,可以考虑图灵机器,它不仅可以移动一个方块,还可以移动两个方块:
经过两个步骤,您将获得:
经过3个步骤,去除重复的边缘等,这样可以得到:
规则多径图的极限
在无限步数之后,规则多路图的极限结构是什么?第一个重要的观察结果是,它在某种意义上是同质的:任何给定节点周围的图形结构总是相同的(即它是一个顶点传递图)。要了解为什么是这样,请回想一下图中的每个节点对应于图灵机的特定不同配置。该节点将导致通过图灵机进化的一步可以从中获得的所有节点。但是(假设头部始终移动±1平方),总有2个平方公里其中之一。因为我们遵循所有可能的“微观规则”,我们可以认为自己只是“盲目覆盖”了我们所拥有的任何配置,所以图形的结构与我们所处的配置无关。
作为一个简单的示例,下面是秒=2,k个=1例,3步后:
在末端有一些诡计,但在中心区域,我们可以看到每个节点正好有4个后继节点。如果我们选取空白带起始节点周围的子图,它的形式如下:
一般来说,每个节点的极限邻域是:
在完整的图表中,这些街区被编织在一起,形成了如下片断:
现在让我们考虑一下这个案例秒 = 1,k个 = 2. 经过4个步骤后,完整图形为:
此处开始节点的邻域为:
在极限图中,每个节点都有一个具有相同结构的局部邻域。如果我们依次观察更大的邻域,则每个节点的这些邻域的极限形式将是:
下面是图灵机在这些连续较大的邻域中不同节点的数量表,这些邻域具有不同的值秒和k个:
在限额内t吨 → ∞在所有情况下达到的节点数如下:

对于k个=1,一个找到(对于 ):
):

对于t吨=1其中一个具有:

如果忽略图中的方向性,只计算距离外的邻居总数t吨,的结果k个=1与之前相同,但在其他情况下不同:
(这些结果似乎逐渐增大了一个系数 .)
.)
所以对于k个=1,极限规则多向图的行为类似于一维空间,但无论如何k个 ≥2,它的行为就像一个无限维空间,其中测地线球的体积随着体积呈指数增长。
有限磁带
到目前为止,我们一直假设我们的图灵机器磁带是无限的。但在某些方面,如果我们限制磁带,则更容易看到发生了什么,因此我们的状态总数是有限的(n秒kn个)。我们可以做的一件事是考虑循环磁带.
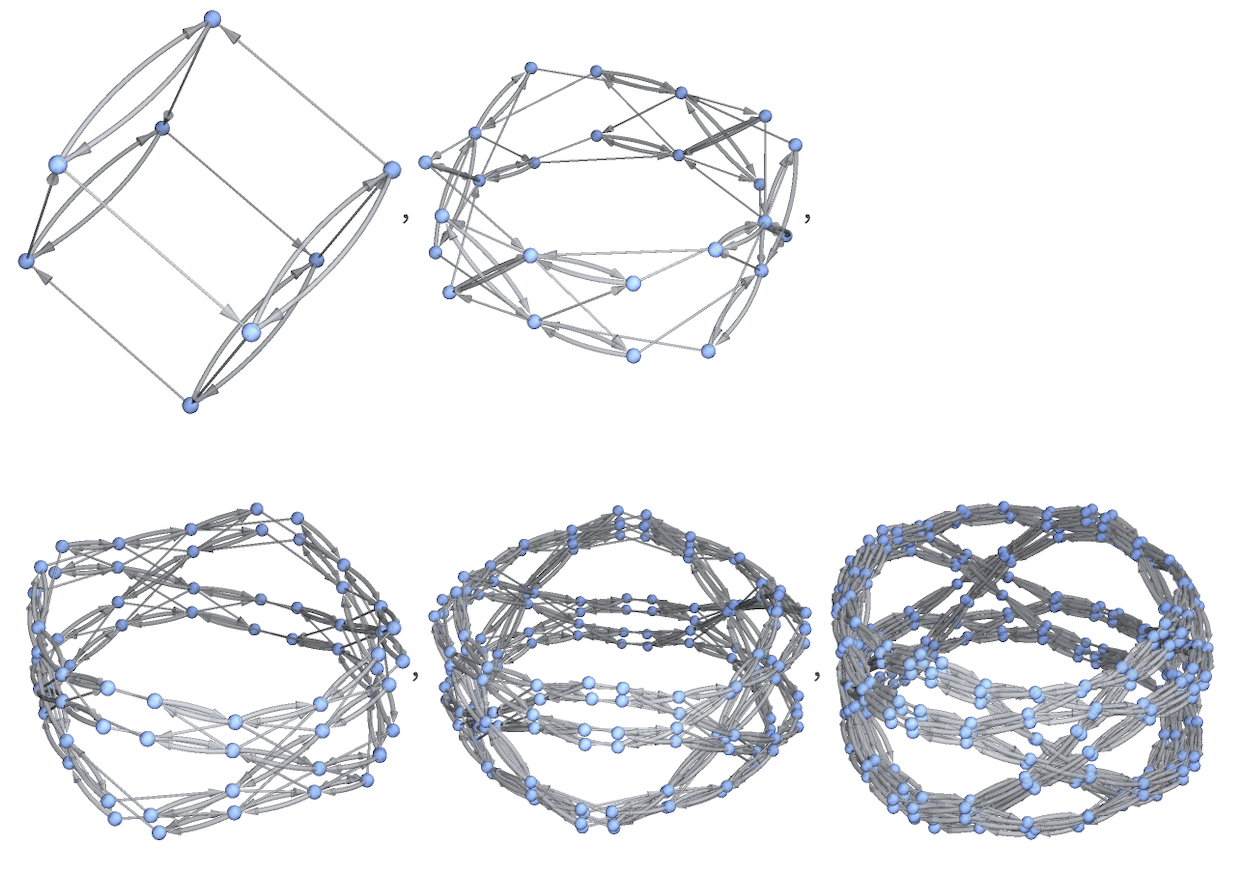
对于秒=k个=1使用连续更长的磁带,我们可以得到:
对于秒 = 2, k个 = 1我们得到:
对于尺寸为10的磁带秒分别为:
如果不是有循环带,而是有一个有限的带,并且坚持头部永远不会离开两端,那么对于秒=k个=1我们得到:
对于秒 = 2, k个 = 1我们得到了
以及连续的整体行为秒与我们在上面看到的无界磁带完全相同:
对于秒= 1,k个= 2,这就是长度3的循环情况:
长度1到6的结果是:
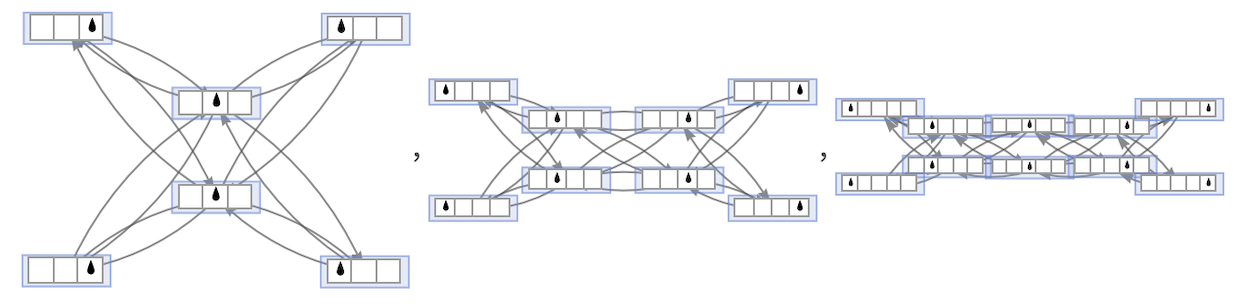
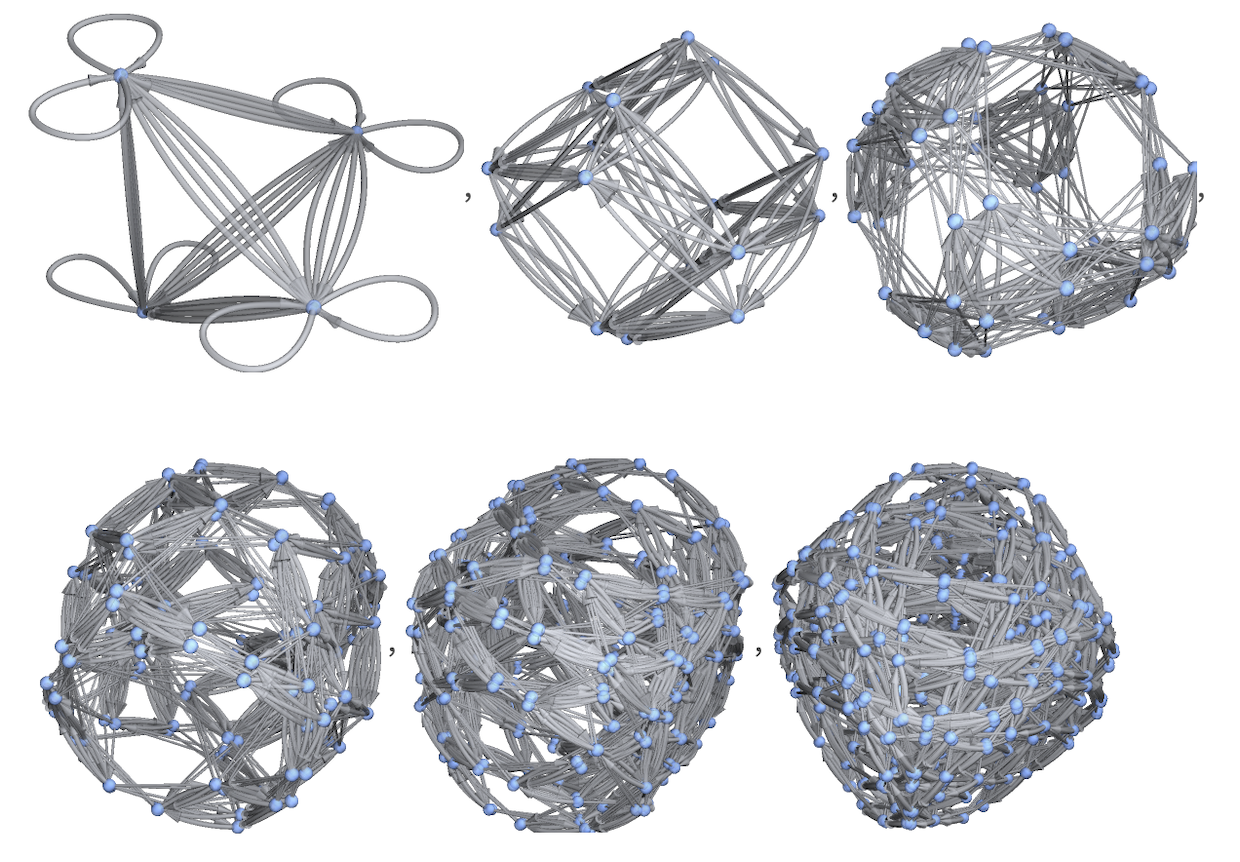
以3D方式渲染这些图像,使其与高维超立方体的连接更加清晰:
长度2到6的非循环情况(长度1微不足道):
在3D中渲染这些将成为:
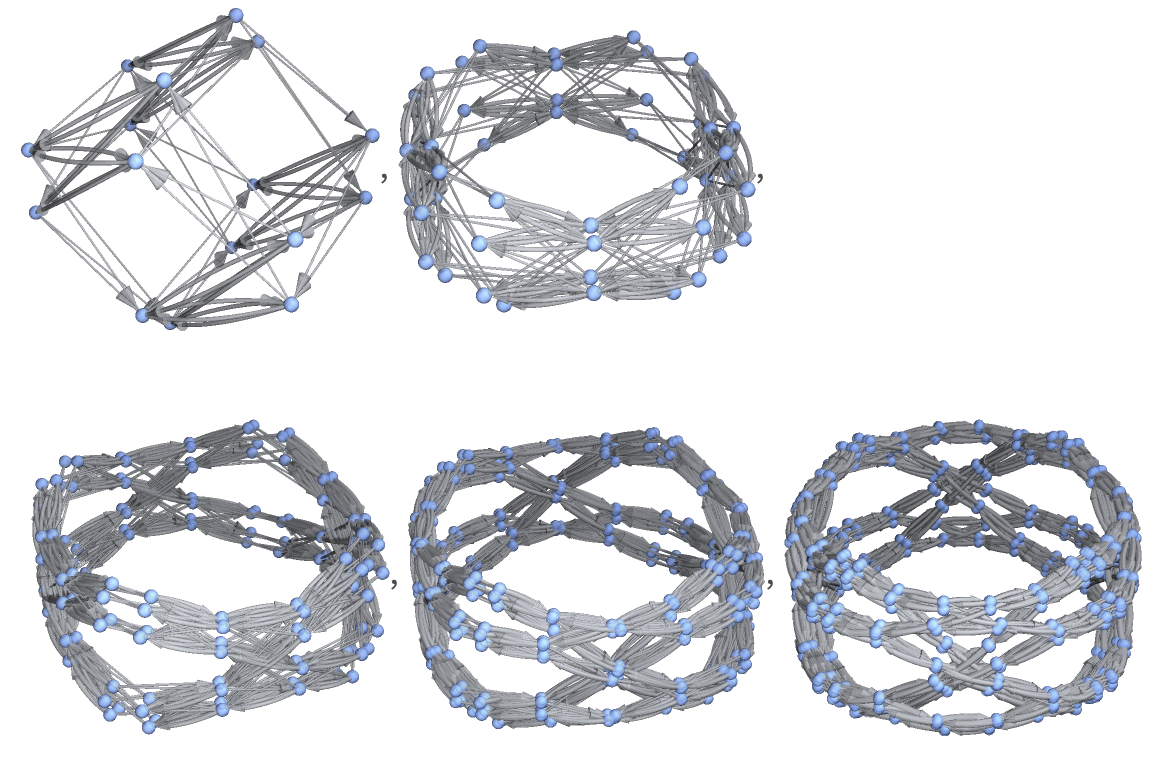
在这种情况下秒= 2,k个= 2对于长度为3的循环带,我们得到:
以3D格式渲染长度1到6的结果可以得到:
在非循环情况下,3D中长度2到6的结果如下(长度1的情况很简单):
图灵机器集团
事实证明,图灵机的rulial多路图有一个很好的数学特征:它们只是群的Cayley图,我们可以称之为“图灵机群”。这是为什么?基本上,这是因为图灵机的可能配置与可以作用于这些配置的转换有直接的对应关系。特别是,人们可以在非确定性图灵机器中挑选出与单个转换相对应的特定转换,并将其用作组表示中的生成器。
让我们从考虑具有有限循环带的图灵机的情况开始。如果胶带有长度n个,机器的可能配置总数为n秒kn个(请注意,如果磁带是有限的,但不是循环的,则不能得到组。)
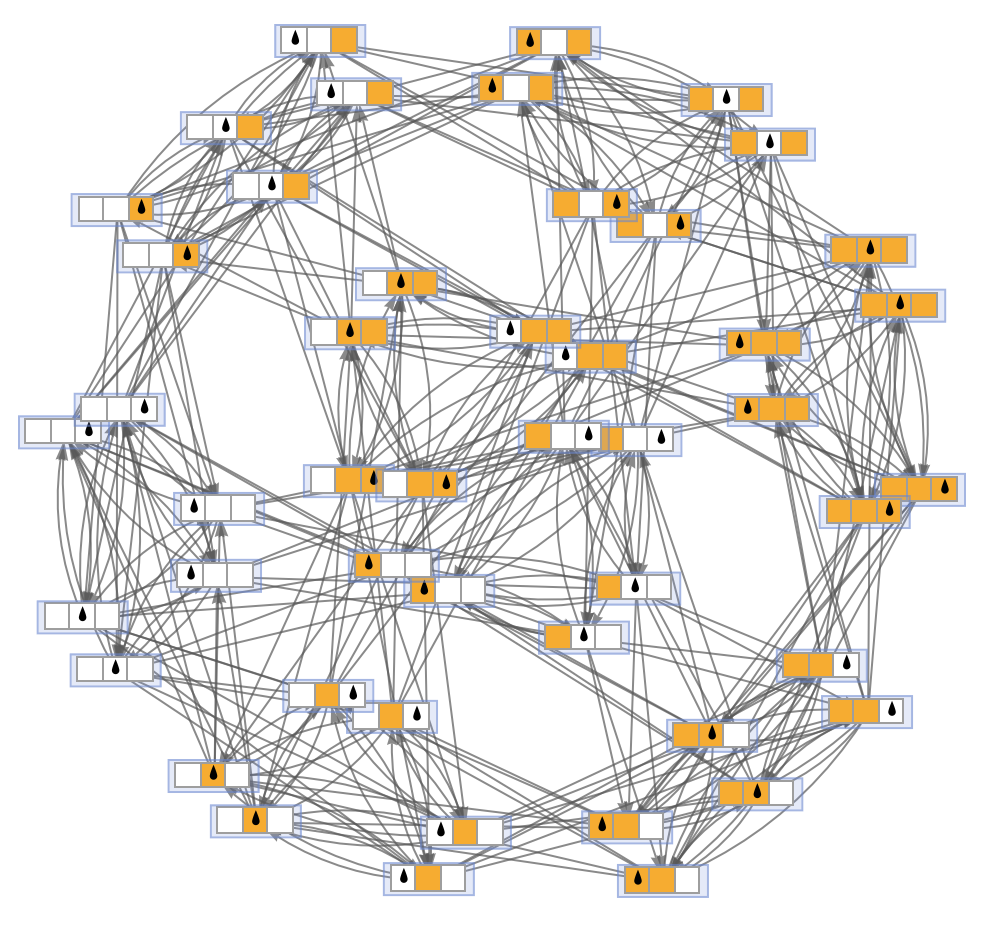
暂时假设秒 = 1,k个 = 2. 然后针对n个=3,有24种可能的配置,规则多路图为:
但这张图是凯莱图对于有限群A类4 × 2:
为了构造这个Cayley图,让我们用成对的整数来表示图灵机的配置 ,其中0≤ 我 ≤ n个–1给出了头部的位置,以及u个(与0≤ u个 ≤ 2n个–1)给出胶带上的数值。(自秒=1,我们不必担心头部的状态。)使用此配置表示法,考虑“乘法”操作:
,其中0≤ 我 ≤ n个–1给出了头部的位置,以及u个(与0≤ u个 ≤ 2n个–1)给出胶带上的数值。(自秒=1,我们不必担心头部的状态。)使用此配置表示法,考虑“乘法”操作:
当此操作作用于配置时,它定义了一个组。这是的乘法表n个 = 3:
或同等方式:
但现在考虑四个要素 ,
, (位置–在循环胶带上缠绕1圈):
(位置–在循环胶带上缠绕1圈):
我们可以将这些视为应用4种可能的图灵机转换的结果
配置(对应于 ):
):
现在,通过将这些元素视为生成器(并有效地将它们不仅应用于初始配置,而且应用于任何配置),我们得到了组的Cayley图,即上面的rulial多路图。
值得注意的是,我们使用的4个元素并不对应于组的最小生成器集。有两个要素就足够了。例如,我们可以使用 和
和 ,这可以分别被认为是将头部向右移动和翻转一个单元格的颜色(再次相对于“身份”配置
,这可以分别被认为是将头部向右移动和翻转一个单元格的颜色(再次相对于“身份”配置 ):
):
通过这些生成器,我们可以得到Cayley图:
我们还可以怎样描述这个群体?对于任何尺寸的磁带n个我们可以用显式排列来写:
(适用于 ,组可以由排列生成
,组可以由排列生成 .)
.)
我们也可以用生成器和关系来象征性地表示它。调用我们的“向右移动”生成器R(右)和“位滑动”生成器F类,则该组至少满足以下关系:

好的,那么这个组有名字吗?对于n个=2,它是8元素二面体群D类4和用于n个=3,这是24元素组A类4 × 2.对于较大n个,似乎没有标准名称。但根据我们的推导,我们可以称之为 。我们可以将其表示为半直积(或花环产品):
。我们可以将其表示为半直积(或花环产品):

正规子群(2)n个这里表示磁带的状态,对应于布尔值n个-立方体。循环群n个表示头部的位置,并作用于布尔n个-通过旋转坐标来立方体。
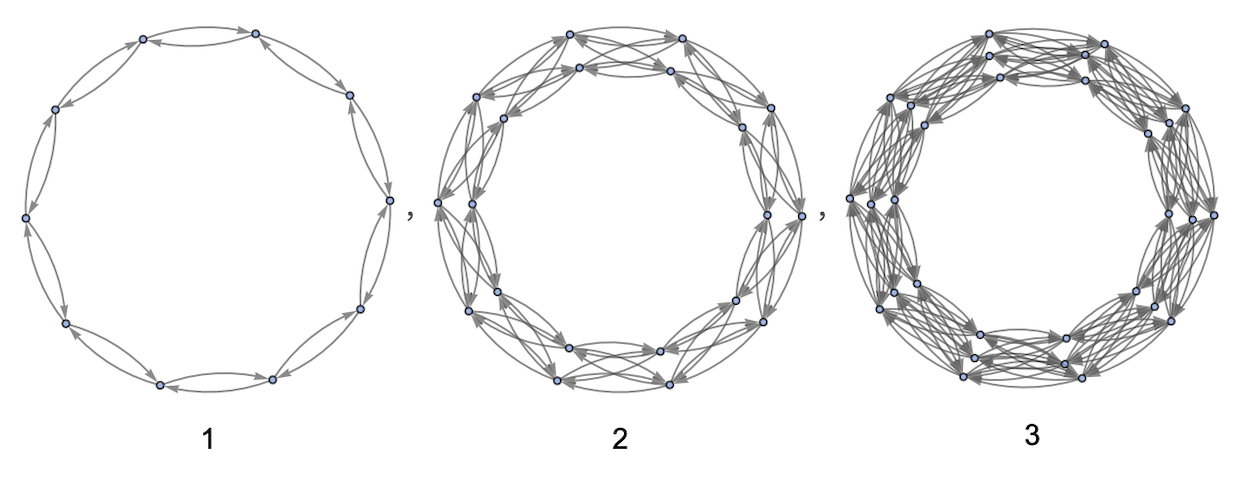
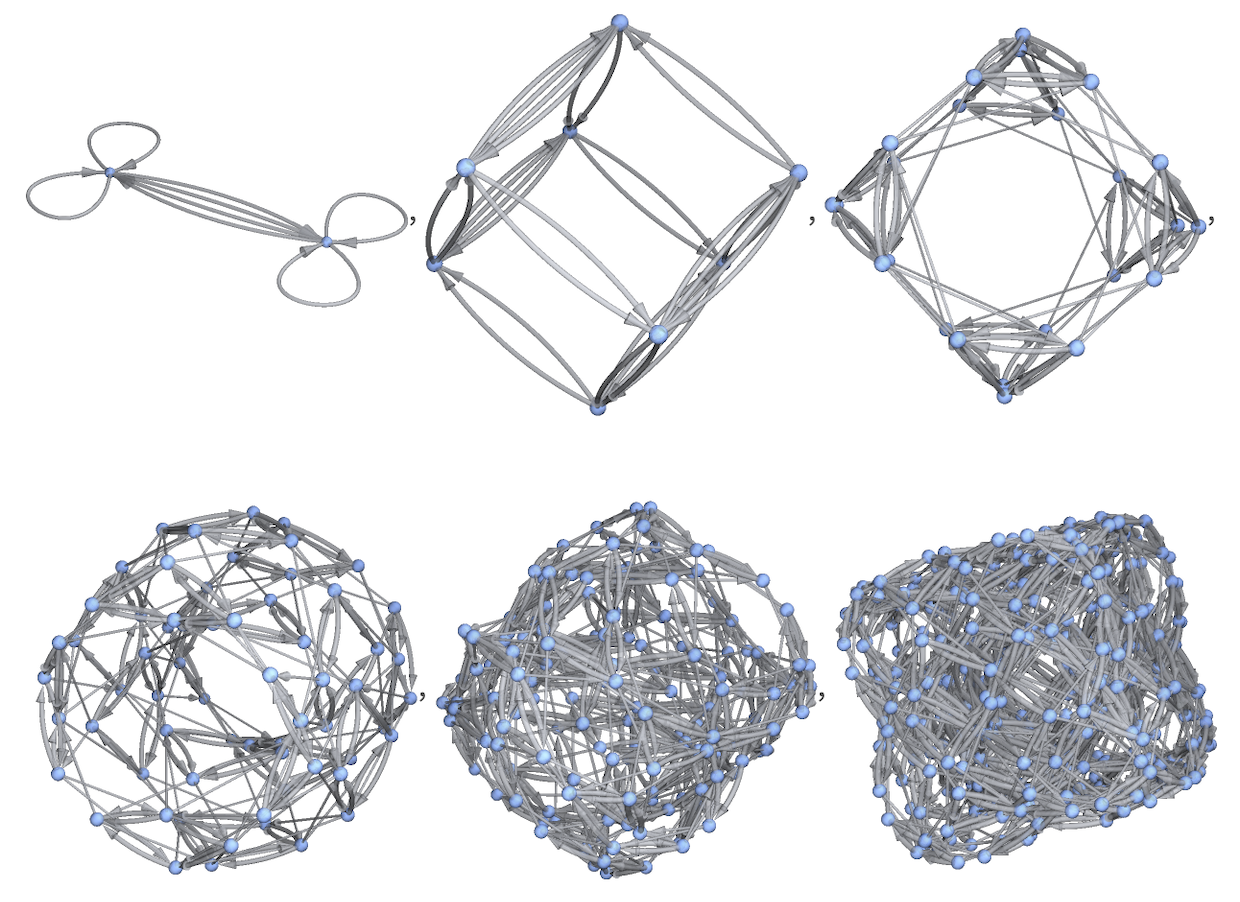
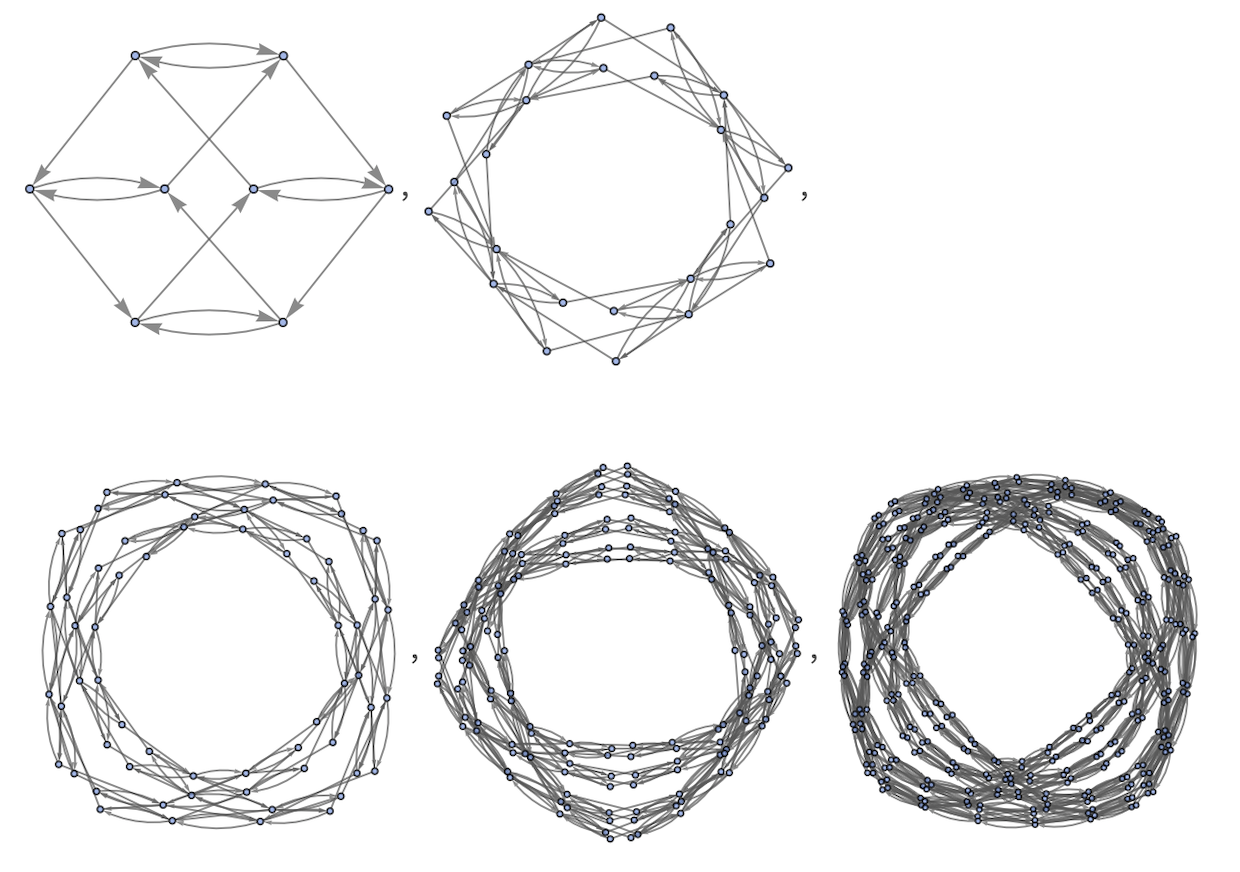
对于任何n个,我们只需使用两个生成器即可生成Cayley图序列:
这些的非定向版本正是立方连通圈图在研究通信网络时出现的:
那么现在限制是什么呢n个 → ∞? 现在,组不再是有限的,但我们仍然有关系

最后,我们可以看到该群可以描述为半直积:

从某种意义上说,该组及其Cayley图由无穷维布尔超立方体。但还有更多。也许有一个有用的极限表征,可以通过现代几何理论.
对于任意秒和k个,我们可以概括为:

确定性图灵机的因果图
在确定性图灵机器中,每一步都涉及一个更新事件因果图可以通过连接头部的连续位置和头部返回到其之前所在位置的连续点来绘制:
再继续几个步骤,这个特定图灵机器的因果图变成:
继续执行更多步骤并重新绘制图形,我们看到得到了一个简单的网格:
的秒 = 2,k个=2图灵机,其中具有最奇异因果图的是“二进制计数器”机器1953:
因果图给出了图灵机行为的良好“总体图”。这里有一些图灵机器(与秒 = 3,k个=2和秒 = 4,k个=2)从一种新的科学(同时比较秒 = 2,k个=3通用图灵机):
以下是它们各自的因果图:
规则多向因果图
关于与规则多路系统相关的因果图,我们能说什么?第一个重要的观察结果是规则多路图总是表现出因果不变性,因为通过包含与所有可能的规则相关联的转换,必然会同时包含规则及其逆规则,因此规则多路图中的每条边的分支总是与相应的合并相关联。
通过以下两个步骤可以很容易地看到这一点秒 = 2,k个=2台图灵机器。这里的规则多路状态图是:
这也可以进行渲染:
明确显示我们获得的事件:
包括我们得到的因果关系
或在3个步骤后:
在这种情况下,纯规则多路因果图是:
在分层形式中,这将成为:
经过5步后,从根到达的节点数量增长如下:
因果不变性意味着该多路因果图最终由单个因果图的大量交织副本组成。在任何给定数量的进化步骤之后,因果图的不同副本将“达到不同的阶段”。以下是三个步骤后的结果:
4步之后:
还可以查看其他图灵机器集的规则多路因果图。对于秒 = 1,k个=1个(此处为5步后)
相当于:
在这种情况下,单个因果图是完全相同的,并且只是:
对于秒 = 2,k个=1一个已经完成3个步骤
或分层形式:
经过5个步骤后,这将变为
或分层形式:
在这种情况下,5个步骤后的单个因果图为:
对于秒=1时,k个=2其中一个结果与案例非常相似秒 = 2,k个 = 2. 3步后,因果图为:
或在5步之后:
删除多个边这是:
这种情况下的个别因果图为:
规则图
就像普通的多路图一样,我们可以研究鳃图它表示它们的横截,因此类似地,人们可以研究rulial多路图规则图代表它们的横截面。我们绘制多路图的分层方法对应于一种特定的叶理选择,通过这种选择,我们可以立即生成规则图。
对于秒 = 2,k个=1一个在2个步骤后
而在三步之后,你会得到:
对于秒 = 1,k个=2步后即可获得:
而在三步之后,一个人有:
步骤1至4的结果顺序为:
对于秒 = 2,k个=2相应结果为:
这些图片是什么意思?正如普通多路系统中的鳃图可以被视为普通“多路空间”中状态(在我们的模型中解释为量子状态)的“纠缠映射”一样,这里这些规则图可以被认为是规则空间中状态的“纠缠贴图”。换言之,它们是一种图灵机配置与其他配置“进化上接近”的映射,从某种意义上说,它们只能通过几个不同的规则选择来实现。
规则空间中的确定性图灵机路径
规则多路图定义了所有非确定性图灵机可以遵循的所有路径。因此,在该图中的每个节点上,都有一个输出边,对应于与该节点对应的配置的任何可能的图灵机转换。但是,如果只考虑一个确定性图灵机呢?然后,它的演化是规则多路图中的一条路径。
例如,考虑秒 = 2,k个=2图灵机:
该机器由空白磁带演变而来,根据:
这对应于规则多路图中的路径:
具有不同的初始条件
路径可能非常不同:
这些图片可能会让人觉得,与确定性图灵机器进化相对应的路径是规则多向图中的测地线。但总的来说,他们绝对不是。例如,从空白磁带开始,规则
在rulial多路图上遵循以下路径:
如果在每一步都允许任何可能的图灵机转换,那么可以沿着测地线路径从对应于初始条件的节点到对应于任何其他配置的节点。但是,如果一个人限制自己在特定(确定性)图灵机中进行转换,那么通常会有许多你永远无法达到的配置,甚至那些你可以到达的配置,你可以通过规则多路图中的迂回路线到达。
给定一个特定的配置(对应于rulial多路图中的一个节点),可能有许多确定性的图灵机可以从给定的初始状态到达它。人们可以认为这些图灵机中的每一个都实现了某种算法。因此,“最优算法”将是确定性图灵机路径中最短的算法。正如我刚才提到的,这通常不是最短的可能路径:这通常是通过具有特定转换序列的非确定性图灵机来实现的。但在确定性图灵机中仍然存在一种最优情况(即“最优算法”)。
但现在我们可以询问所有可能的确定性图灵机,它们在规则多路图中可以到达哪里。以下是4个步骤的结果秒 = 2,k个=我们一直在考虑的2台图灵机:
以下是第1、2和3步的结果:
这有什么意义?本质上,我们看到的是确定性计算与非确定性计算所能达到的效果的比较。以4步情况为例,“背景”灰色规则多路图显示了通过4步任意非确定性计算可以实现的功能。红色区域是确定性计算在相同步数下可以实现的。
从某种意义上说,这是对P与NP问题与实际的P与NP情况不同,我们不允许使用任意多项式时间算法;我们只是在寻找可能秒 = 2,k个=2专门针对4个步骤运行的图灵机算法。但如果我们适当地推广这一点,P=NP将意味着“红色区域”必须在某种限度内有效地“到达图中的任何位置”。
更准确地说,P和NP的官方定义是针对决策问题的:你从定义问题实例的初始条件开始(“这是吗布尔公式可满足?” 或其他),系统最终必须演化为表示“是”或“否”的状态。我们可以想象这样的设置,使得结果与图灵机的特定配置相对应。然后,输入也被编码为图灵机的初始配置,我们想知道当我们考虑越来越大的输入时会发生什么。我们可以想象绘制规则的多路图,这样逐渐增大的输入将显示为“距离中心越来越远”。如果我们考虑非确定性图灵机(与NP计算类相关),那么最短计算将是规则多路图中从输入配置到结果配置的测地线路径。但对于确定性图灵机(与P类相关)来说,它通常是一条更加迂回的路径。
标准的P与NP问题询问限制行为,因为一个人增加了输入计算的大小,人们可以想象这个问题可以根据规则多路图的连续极限“几何化”。当然,不能保证存在任何合理的限额。很可能是P⊂NP是实际上无法确定也就是说,在标准公理系统(如皮亚诺算法或ZFC集合论)中无法给出它的有限证明。
人们可以想象,通过经验测试越来越多的图灵机,并观察它们在NP完全问题上的表现。人们可能会想到将其运行时间绘制为n个越来越大n个一段时间内,特定的图灵机器可能会成为赢家。但接下来可能会有另一个接手。随着人数的增加,可能会发生多少“惊喜”n个(不知怎的,这让人想起了Skewes数的故事以及是否对数积分[n] >Prime(主要)[无].)
在计算复杂性理论中,人们通常会考虑用标准的“类工程”方法显式地构造优化算法。但我认为,从一种更经验性的方法中可以学到很多东西,即不尝试构建最优算法,而是通过搜索所有可能的程序“在野外”找到它们。在过去,“仅仅搜索程序”似乎不会产生任何非常有趣的东西。但我在一种新的科学就是说,即使在小程序中(例如,小到可以枚举所有程序),通常也会有非常复杂且可能“有用”的行为。这使得尝试这样做似乎更加合理”经验计算复杂性理论“-枚举可能的程序以找到最佳程序,等等。
可以将小型程序视为低算法复杂度因此,搜索其中的“快速程序”可以被视为搜索时间复杂度低、算法复杂度低的程序。我们不知道低算法复杂度的约束到底有多强,但从我在计算领域所看到的(以及计算等效原理等内容中所体现的内容)来看,它似乎不是一个很大的约束。
我在年学习了“经验计算复杂性理论”一种新的科学尤其是图灵机器。有趣的观察结果之一是事物的最优算法通常不是什么这可以很容易地以一种循序渐进的工程方式进行建造。相反,它是一种基本上只能通过搜索可能的程序才能找到的东西,而通常似乎没有一种“通用形式”可以“适用于所有人”n个“,让我们很容易地推断出n个 → ∞限制。换句话说,我们现在所认为的规则空间中的路径序列似乎没有任何收敛到“连续极限”的迹象。
这一切发生在分拣网络。假设你得到了一个n个要排序的数字。您可以直接通过n个2两两比较,很容易对其进行优化。
但显式搜索显示,连续n个分别为:
值得注意的是它们看起来是多么复杂和“随机”;他们似乎没有任何明显的模式(我猜根本没有)。以下是这些网络的规模图(除以n个2):
值得注意的是,这些都是确定性网络。我们还可以想象非确定性网络(实际上,我们可以通过考虑成对比较的所有可能的连续位置来构建规则多路图),在非确定性网络中,总是可以进行排序n个最多个数字n个–1个步骤。
确定性图灵机计算的空间
我们刚刚看到了确定性图灵机器计算的结果是如何在所有可能的非确定性图灵机计算的规则多径空间中布局的。但是,如果我们只看确定性图灵机器计算本身的图形,会发生什么呢?
以下是2步和3步的完整规则多路图,其中叠加了确定性图灵机器计算的图,如前所示:
但现在让我们“只提取红色子图”——换句话说,仅将那些配置(至少是4096中的一个)作为节点包括在内秒 = 2,k个=2台图灵机可以在2或3步后到达:
注意,经过两个步骤后,确定性图灵机器仍然可以达到非确定性机器可以达到的所有36个配置(尽管不是通过那么多的路径)。但经过3步,在所有确定性图灵机中,它们只能达到68种可能的配置,而非确定性图灵机器可以达到100种配置。
对于所有可能的非确定性图灵机秒 = 2,k个=2在连续的步骤中,最终可以达到的配置总数大约翻了一番:
然而,对于确定性图灵机器,可以很快达到的可能配置数量增加得慢得多:
事实上,这里有一个明显的界限:在任何给定的步骤中,最多可能发生的是4096个秒 = 2,k个=2图灵机产生了一种新的配置,换句话说,达到的最大配置数量增加了4096个。
查看连续步骤的差异,我们发现:
换言之,在所有4096台图灵机器中,每一步都会达到大约100种“新配置”。(这里的实际序列看起来非常随机;不清楚是否有任何特定的规律。)
现在让我们看看实际形成的图形。通过4到7个步骤,我们可以得到:
经过10步和20步后,结果如下:
这是50步后的结果:
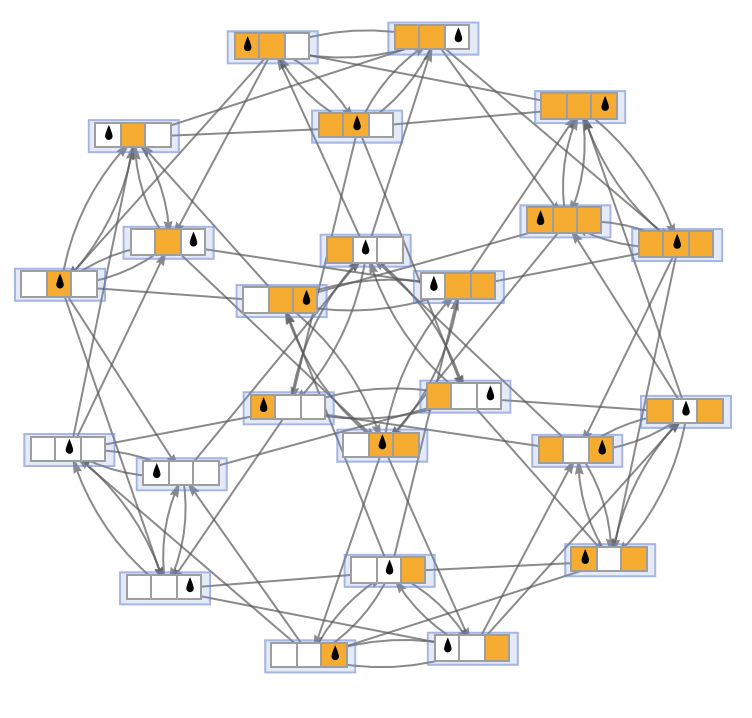
这些图表的结构数量惊人。初始空白磁带配置(如下所示)附近有一个“中心区域”,许多不同的图灵机最终访问相同的配置:
下面是该区域的3D渲染:
但离开这个区域,最终会出现“辐条”(大约100个),对应于图灵机器,它们在配置空间中“独立探索新领域”。
那些“边缘配置”是什么样的?以下是前几个步骤的排序集合:
为了进行比较,以下是非确定性图灵机在两个步骤后可以达到的所有配置的结果:
以下是经过更多步骤的确定性图灵机的结果:
我们还可以询问哪些机器是典型的“探索新领域”机器。以下是30个步骤的结果:
随着我们进行更多的步骤,确定性图灵机器可以达到的配置图会增长。但是,经过足够多的步骤,它的核心是否至少达到了某种极限?我们可以通过观察从初始空白带配置开始的图中测地线球的增长率来了解这一点,就像我们之前多次做的那样。测地线球每个新层上可以达到的新配置总数最多为4096个,实际上要小得多。以下是在整体演进的步骤100、200、…、500中添加到连续层上的新配置数量:
如果更仔细地检查上图中的“辐条”,“下台”的原因就会更清楚。这里有一个例子:
基本上,发生的情况是,多台图灵机器正在追踪大致相同的配置序列,但有些机器是“高效”的,而另一些机器则是“浪费时间”,例如在交替的步骤上翻转头部。辐条的“内部部分”更接近初始节点,涉及“低效”和更高效的图灵机器。但“低效”的图灵机器根本达不到目的,因此它们对测地线球的外层没有贡献。上述情节中的最后一个“下台”——基本上是图灵机器所用步骤总数的一半——涉及到大约一半图灵机器的“逐渐消失”,这些机器实际上“浪费了一半的步骤”。
对于所示的“辐条”,以下是涉及的实际图灵机器历史(有8台机器制作了第一个历史的相同副本):
元胞自动机模拟
我们刚刚为确定性图灵机绘制的图形可以用于任何一类确定性计算系统。特别是,它们可以用于(至少对我来说,更熟悉的是)256k个 = 2, 第页=1元胞自动机(是的,令人惊讶的是,这么多年来我从未拍过这样的照片,尽管第956页的注释属于一种新的科学接近。)
以下是从包含单个黑色单元格的初始条件开始的5步和10步的结果:
下面是50个步骤的结果:
以下是10个步骤的结果,用“达到最远”的规则的实际细胞自动机进化进行了注释:
如果我们只包含偶数规则(将空白状态保留为空白),则更容易看到发生了什么:
这是一张有趣的“细胞自动机空间”地图。(注意左下方有第30条规则,右下方有第110条规则。)
与图灵机相比,所有规则在连续步骤上探索的新配置总数具有更规则的形式:
结果大多与72到84之间的周期4交替出现,尽管在形式2的步骤上有所下降米.
如果我们走一定数量的步数(比如200步),然后看以初始条件为中心的测地线球,那么连续层中的构型数量就是:
这些结果都适用于普通的、确定性的元胞自动机。那么,是否存在非确定性细胞自动机?通常,细胞自动机被定义为在每一步都一致地更新每个细胞。但也可以考虑顺序细胞自动机,其中每个步骤都会更新特定的单元,在这种情况下,很容易定义一个非确定性版本,可以为其构建多路系统之类的东西。(注意,对于完全规则的多路系统,这种非确定性细胞自动机基本上与非确定性相同移动自动机,靠近图灵机器。)
计算能力与规则空间的结构
图灵机的计算能力对其规则空间意味着什么?让我们从计算通用性开始。
关于确定性图灵机的一个重要事实是,存在通用图灵机。在4096人中秒 = 2,k个=2条规则没有。但一旦有人去秒 = 2,k个=已知3条规则(其中有2985984条)(感谢我的中的个结果一种新的科学、和亚历克斯·史密斯2007年的证明)有一台万能机器。规则是:
从空白磁带开始,这台机器
和对应因果图是:
但在规则多路系统中,通用机器的存在意味着什么?从给定的初始条件出发,任何确定性图灵机都会在规则多径图中追踪出一些轨迹。如果一台机器是通用的,这意味着通过适当选择其初始条件,它可以“编程”以“模拟”任何其他图灵机器,也就是说,它的轨迹将跟踪它所模拟的任何图灵机器的轨迹。“track”是什么意思?基本上,有一些固定的方案,允许人们从通用图灵机的状态转换到它正在仿真的机器的状态。“方案”将对应于规则多路图中的一些翻译,要求这种翻译总是有一定的限制。换言之,当通用机器的起点(即初始条件)在规则多路图中移动时,其轨迹将“摆动”,并且这种“摆动”的多样性足以使轨迹接近任何给定的其他机器的轨迹。
另一方面,如果一个人正在处理的机器不是通用的,那么它的轨迹就不足以完成这项工作;在某种意义上,轨迹将过于受限,无法成功“跟踪”所有可能的其他确定性图灵机器轨迹。
非确定性图灵机器呢?在这种情况下,普适性可以解释为,给定特定的初始条件,人们想要的输出发生在非确定性图灵机所遵循的不同路径上的某个地方。(如果一个人试图解决决策问题计算复杂性类NP-然后,人们可以通过图灵机器状态的某些特性来安排“发出得到答案的信号”。)在“极端非决定论”的情况下——用于构建规则多路图——在某种意义上,通用性成为纯粹关于规则多路图结构的陈述。基本上,它只需要规则多路图有足够的连通性,如果存在因果不变性,就可以保证这一点(因此没有什么比“事件视界”更合适的了)。
但是,必须允许“极端非决定论”获得普遍性吗?使用秒 = 2,k个 = 3我们知道有一种纯粹的确定性图灵机器可以实现这一点我的猜测是秒 = 2,k个=2也有“稍微多向”规则。在标准确定性中秒=2,k个=2图灵机,有4种情况的规则,每种情况都指定了一个唯一的结果。但是,如果规则中只有一种情况会产生两种结果呢?该规则是非确定性的,但可以认为它只是为该规则指定5个定义案例的结果。我猜想,即使这样,也足以在系统中实现普遍性。
像这样的非确定性规则不会在规则多路图中追踪出单个路径。相反,它将给出一组路径,不同的路径对应不同的非确定性选择。但普遍性的故事与确定性的情况非常相似:人们只需问捆绑包中是否有任何东西成功地跟踪了自己仿真的机器的轨迹。
值得记住的是,任何给定的规则通常都不会遵循规则空间中的测地线。它将遵循一些更迂回的路径(或路径束)。但假设有一个规则可以追踪出一些轨迹,对应于执行一些计算。这个计算等效原理这意味着,在不同的可能规则中,这些计算都有一个标准的“最大计算复杂度”,许多规则都实现了这一点。但这一原则也意味着这些最大复杂度的计算之间存在等价性,从某种意义上说,它们之间总是有有限的计算。
让我们在规则空间中思考这一点。假设我们有两个规则,从相同的初始条件开始。那么,在开始的时候,在规则之间进行转换是微不足道的。但之后t吨步骤,这些规则所涉及的州可能会出现分歧,这可能会使它们之间的转换变得越来越困难。规则多向图和规则空间的一个关键思想是,它可以让人们以统一的方式讨论计算和它们之间的转换。假设两条规则的轨迹在规则空间中走了一定距离。然后可以查看它们的散度,并查看从一个到另一个的“平移计算”需要多长时间。
在普通时空中,我们假设有一个特定的时间t吨已过。然后我们知道可以穿越的最大空间距离是c吨,其中c(c)是光速。在规则空间中,有一些直接类似的东西:及时t吨,我们可以称之为可以穿越的最大规则距离ρ t吨但在这里,计算等效原则作出了重要贡献:它意味着在整个规则空间中,在所有情况下,ρ已修复。要成功地将一个规则的结果转换为另一个规则,可能需要大量的计算工作。但这个比例总是一样的。实际上有一个计算不可约的尺度,其特征是ρ就像光速的恒定性一致地限制了物理运动一样ρ统一限制规则运动。
但假设你正试图从规则空间的一个点到达另一个点。如果从你的起点开始,你可以沿着一条不可约且有效的普适计算的路径,那么你就可以成功地到达另一点。但是,如果从你的起点出发,你只能遵循一个可还原的计算,那么这通常不会是真的。这意味着规则空间中的“计算可约性口袋”有点像物理空间中的黑洞。你可以从不可还原的区域进入它们,但你无法摆脱它们。
甚至在我们在这里探索过的简单图灵机器的规则空间中,也可能有类似现象的迹象。但要实现所有必要的连接,还需要做很多工作。
统治空间的新兴图景
物理空间、鳃部空间和规则空间之间有很多相似之处。例如,在物理空间中,存在控制效果在物理空间不同部分之间传播的最大速率的光锥。在鳃部空间,存在着控制量子纠缠最大速率的纠缠锥。在规则空间中,人们可以想到“仿真锥”,它控制着一种行为描述转化为另一种行为的最大速率。
当涉及到应用这些东西来建模物理宇宙时,一个关键点是,观测者必须是系统的一部分,受与其他事物相同的规则支配。这意味着观测者只能对系统的某些“适当修改”方面敏感。但实际上,在想象观察者如何“感知”一个系统时,通过定义一些适当的叶理来协调系统几乎总是很方便的。在物理空间中,这涉及到使用相对论中的参考框架对因果图进行叶化。在鳃部空间,它涉及我们的量子观测框架的概念。在规则空间中,我们可以发明另一个这样的概念:规则描述框架,或者仅仅是规则框架。
实际上,不同的规则框架对应于描述宇宙的进化是按照不同的规则运行的。因果不变性意味着不同的规则框架最终必须给出等效的结果。但描述宇宙时间演化的具体方式将取决于所使用的规则框架。在一个框架中,人们将以一种方式描述宇宙;在另一个框架中,另一种方式。关于宇宙如何演化的“故事一”在不同的框架中会有所不同。
就像量子力学中的叠加一样,在规则空间中可能有一些区域的概念,在这个概念中,人们以某种方式将宇宙视为按照“规则纠缠”的规则集合进行操作。
虽然我们最初的动机是理解物理,但我们正在研究的许多规则空间也适用于纯计算系统。例如,即使没有任何物理空间的概念,我们也可以考虑规则空间。实际上,我们可以想象规则空间是计算系统可能规则空间的某种映射。(注意,由于计算的普遍性和计算等效原理什么样的规则最终都无关紧要-图灵机器,细胞自动机,组合器,无论我用什么来“参数化”规则空间。)
在某种意义上,规则空间中的不同位置对应着不同的规则。规则空间中不同位置的路径对应于根据不同规则进行的进化。那么规则空间中运动的模拟是什么?实际上,它有一个逐渐改变规则的框架。如果一个人试图找出自己的系统中发生了什么,那么“坚持一条规则”从根本上来说是最有效的。如果一个人逐渐改变了规则,那么他就必须不断地“转换回”原来的规则,用他所达到的任何规则来模仿这个规则。这样做的结果是,会有相对论时间膨胀的精确模拟。规则空间中的快速运动会导致时间进程变慢。当然,为了正确地讨论这一点,我们真的必须讨论规则的多路因果图等。
但有一件事是明确的:运动速度超过某个最大速度ρ是不可能的。从系统内部来看,如果你改变规则位置的速度快于ρ.
在对图灵机器的抽象研究中,ρ只是一个任意参数。但在实际的物理宇宙中,它必须有一个确定的值,如光速c(c)或我们的最大纠缠速度ζ。甚至很难估计ζ可能是。大概估计ρ将更加困难。但至少讨论一下我们如何开始考虑估计是很有趣的ρ.
关于规则空间的第一个关键观察是,在我们的模型中,它是离散的。换句话说,存在一个可能规则的离散空间。或者,换言之,理论是量子化的,理论之间有某种基本距离,或者相邻理论之间的“理论空间”最小距离。
但是这个距离是以什么单位表示的呢?基本上它是以规则或程序大小为单位的。给定任何程序或规则,我们可以想象用某种语言(比如Wolfram语言或者作为一个特定通用图灵机的程序,或者其他什么)现在我们可以通过查看写出程序所需的标记数量来描述程序的大小。
当然,在不同的语言中,这个数字在最简单的层次上是不同的,就像表示一个数字所需的十进制数字的数量不同于二进制数字的数量,或者说它用素数表示的长度。但这就像以英尺或米为单位测量长度:即使数值不同,我们描述的长度仍然相同。
重要的是要指出,仅仅用“原始信息内容”或普通比特来衡量事物是不够的,如信息论相反,我们需要某种“语义信息内容”的度量:直接告诉我们计算要做什么的信息内容。
同样重要的是要指出,我们所需要的与中所讨论的不同算法信息论。一旦有了计算通用系统,就可以随时使用它来从一种语言翻译成另一种语言在算法信息理论中,概念是人们只需期望包含一个“仿真程序”就可以测量程序的长度,直到一个加法常数这适用于任何测量长度的语言。但在通常的算法信息理论形式中,人们不必担心仿真需要多长时间;这只是一个问题,最终是否有足够的信息来做到这一点。
然而,在我们的设置中,仿真需要多长时间并不重要,因为仿真过程实际上是我们系统的一部分。基本上,我们需要仿真所需的步数在某种意义上以常数为界。
那么,好的,这对ρ? 它的单位大概是每单位时间的程序大小。因此,要定义它的值,我们必须说明我们是如何衡量程序大小的。也许我们可以想象我们在Wolfram语言那么应该有一个确定的值ρ对于我们的宇宙,以每秒Wolfram-Language-tokens为单位进行测量。如果我们选择使用(2,3)-图灵机器-然后我们会得到一个不同的数值。但是,假设我们使用了正确的转换,值将是相同的。(是的,无论是恒定时间还是非仿真,都有各种微妙之处,等等。)
在某种意义上,我们可能会想到ρ作为最终的“宇宙处理器速度”:我们使用的任何语言中的标记被“解释”和实际“执行”以确定宇宙行为的速度有多快。
我们能估计一下ρ? 如果我们的单位是每秒Wolfram-Language-tokens,我们可以先想象一下用Wolfram语言计算模型的规则多路图的某一部分,然后看看它需要多少操作。为了允许“所有可能的规则”,我们必须增加规则的可能左侧(和右侧),以反映每一步代表宇宙的超图的大小。但现在我们需要除以规则多路图中的“并行线程数”。所以我们可以争辩说,我们只剩下(Wolfram语言中表示的空间超图的大小)/(初等时间)之类的东西。
因此,基于我们的以前的估计(我认为这只是一种模糊的暗示)我们可能会得出这样的结论:
ρ~ 10450Wolfram-Language-tokens/秒
rulial多路图(rulial的类比Ξ)中“并行线程”的数量可能与包含宇宙中大约节点数的可能超图的数量有关,或者非常粗略地(10350)^(10350) ≈ 。如果我们询问宇宙处理的Wolfram语言标记的总数,还有一个因素~10467,但这种“并行性”将完全占据主导地位,其结果将是:
。如果我们询问宇宙处理的Wolfram语言标记的总数,还有一个因素~10467,但这种“并行性”将完全占据主导地位,其结果将是:
 Wolfram语言标记
Wolfram语言标记
好的,那么给定一个值ρ我们该如何观察呢?假设在规则空间中有一种量子不确定性的模拟,它与ρ目前尚不完全清楚这将如何显示,但有一种可能性是,这将导致归纳推理的内在限制。例如,只给定有限的观察时间,可能根本不可能确定超出某个(“规则”)准确性的宇宙在描述语言中遵循的规则。不同规则之间的行为分歧率最小,理论之间的距离最小,以这种分歧率区分理论需要一定的时间。
在我们的模型中,就像物理和鳃部空间中的每一条因果边都与能量相关一样,规则空间中的每条因果边也应该与能量相关。换句话说,规则空间的特定部分发生的处理越多,就应该考虑到那里存在的物理能量越多。正如物理空间中的爱因斯坦方程或鳃部空间中的费曼路径积分一样,我们应该期望规则空间中特定区域的能量应该反映在测地线的偏转中。
规则空间中的测地线是从宇宙的一种结构到另一种结构的最短路径,使用所需的任何规则序列。但尽管这有点像非确定性计算中理论层面的考虑,但这并不是我们通常熟悉的:我们习惯于选择一种特定的描述语言并坚持使用它。因此,对规则空间中测地线偏转的确切解释尚不清楚。
但我们还可以考虑其他一些事情。例如,假设宇宙正在规则空间中膨胀,这可能意味着在某种意义上,随着时间的推移,对它的更多描述变得可能。规则黑洞呢?如上所述,规则空间中与计算可约性相对应的部分应该表现得像黑洞一样,实际上“时间停止”了。或者,换言之,当宇宙的大部分时间都在进行,不可约计算也在进行时,计算可约性将导致该过程在规则黑洞中停止。
据推测,规则黑洞附近的测地线将被拉向它。不知怎的,当有一种描述语言导致计算可约性时,它附近的语言也将不再能够成功描述计算不可约过程。
我们能估计规则黑洞的密度吗?让我们考虑一下图灵机器的情况。实际上,我们想知道在所有可能的非确定性图灵机器中,非普适性的密度是多少。想象一下,我们使用一台通用机器来模拟所有的图灵机器。那么,这实际上相当于询问该机器的初始条件中有多少部分会导致可约化的行为,或者,本质上,在图灵机器的传统特征描述中,停止。但在所有可能的输入中,通用图灵机将停止的概率恰好是Greg Chaitin的Ω换句话说,规则空间中规则黑洞的密度取决于Ω.
但是Ω不仅仅是一个数字π我们可以随心所欲地精确计算;这是无可争辩的,因为图灵机器在任何有限的时间内都无法计算到任意精度。现在,从某种意义上来说,规则黑洞的密度是无可争辩的,这并不太令人惊讶,因为考虑到计算的不可约性,可以确定某个东西是否真的是规则黑洞,没有任何东西可以从中逃脱,人们可能需要无限长的时间来观察它。
但对我来说,格雷格·查廷的有些个人兴趣Ω以任何方式出现在与宇宙有关的任何潜在描述中。你看,我和格雷格就宇宙是否“像π“或”类似Ω”. 换句话说,有没有可能有一个规则,让我们像计算(比如,原则上,用图灵机器)数字那样计算宇宙的运行π? 还是我们必须超越图灵机器来描述我们的宇宙?我一直认为我们的宇宙“就像π”; 格雷格认为这可能是“Ω”. 但现在看来,我们可能都是对的!
在我们的模型中,我们说我们可以计算宇宙的作用,原则上使用图灵机。但我们现在发现,在整个规则空间中,一般限制性声明发挥了作用Ω在一个特定的规则观察框架中,我们能够“像这样”分析宇宙π”. 但是,如果我们想知道所有可能的规则观察框架,或者从某种意义上说,所有可能的宇宙描述的空间,我们将面临Ω.
在我们的模型中,在一个特定的规则观察框架中追踪到的宇宙的实际运行,被假定永远不会对应于任何比图灵机器更强大的计算能力。但假设有一个超计算机在我们的宇宙中。它看起来像什么?这将是一个有效的ρ是无限的——规则测地线无限发散的地方——规则空间中的一种白洞(或者可能是宇宙事件视界)。(我们也可以将超级计算机视为在规则多路图中引入无限短路径,普通图灵机路径永远无法“赶上”,因此会产生因果影响。)
但如果给定一个进行超计算的宇宙,我们可以想象为它定义一个规则多向图。然后,我们的宇宙将在这个更高层次的规则空间中显示为一个黑洞。
但好吧,如果有一个级别的超级计算机,为什么不考虑所有可能的级别呢?换句话说,为什么不定义一个超规则多路图,其中使用的可能规则既包括普通计算规则,也包括超计算规则?
一旦我们处理超计算系统,我们就可以继续下去,实际上增加了越来越多的神谕-并逐步提升算术层次。(“中级学位“可能被认为会导致一些不完美的层次结构,但我怀疑它不够健壮,无法应用于完整的规则空间。)在特定级别的超规则多向图中,低于它的级别可能会显示为规则黑洞,而高于它的级别将显示为规则白洞。
没有什么可以让我们只考虑有限层次的算术层次;我们也可以想象提升到超限水平,然后继续向更高的无穷大水平前进。当然,根据我们的模型,这些都与我们特定的物理宇宙无关。但在理论层面上,我们至少可以在某种程度上“象征性地描述它”,即使在我们的宇宙中也是如此。
谢谢
感谢乔纳森·戈拉德的各种讨论,以及塔利·贝农托德·罗兰(Todd Rowland)、埃德·佩格(Ed Pegg)、何塞·马丁·加西亚(Jose Martin-Garcia)和克里斯托弗·沃尔夫拉姆(Christopher Wolfram)。







































































































![RulePlot[图灵机器[2506]](https://content.wolfram.com/sites/32/2021/09/sw0608img323.png)












