数学控制及相关领域
浙江大学数学科学学院,杭州310027
*通讯作者:Hailing Xuan
本文研究了考虑损伤和记忆的摩擦接触模型。可变形体由粘弹性材料组成,过程假定为准静态。材料的拉伸或压缩引起的机械损伤包含在本构关系中,损伤函数由非线性抛物线夹杂建模。然后,该模型的变分形式由一个由历史相关的半变分不等式和非线性抛物型变分不等式组成的耦合系统控制。我们引入并研究了该问题的一个全离散格式,并导出了数值解的误差估计。在适当的解正则性假设下,导出了线性有限元法的最优阶误差估计。给出了接触问题的几个数值实验,为理论结果提供了数值证据。
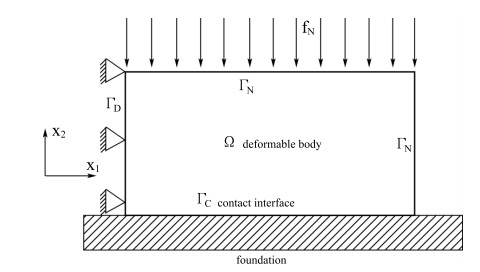
图1。 二维示例的参考配置
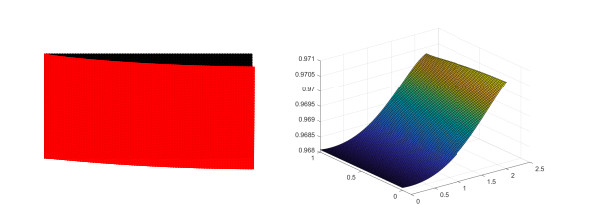
图2。 变形形状(左)和损伤区域(右)的结果
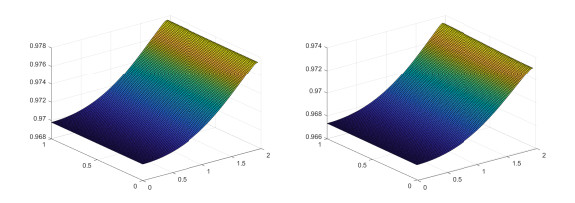
图3。 $a=1,\\mu=0$(左)和$a=1,\\mu=1$(右)的结果
图4。 变形形状(左)和损伤区域(右)的结果
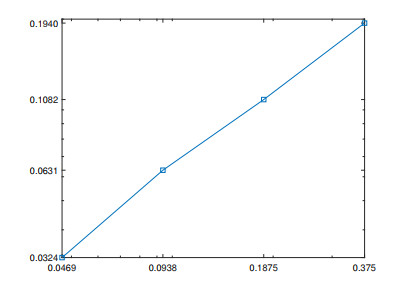
图5。 数值误差
表1。 数值误差
数字(5)
桌子(1)
HTML视图(1804) PDF下载(469) 引用人(0)
/
二维示例的参考配置
变形形状(左)和损伤区域(右)的结果
结果与$a=1,\\mu=0$(左)和$a=1,\\mu=1$(右)
数值误差