离散和连续动力系统-B
阿拉巴马农工大学数学系,美国阿拉巴马州35762 Normal
美国阿拉巴马州亨茨维尔市阿拉巴马大学数学科学系,邮编:35899
*通讯作者:吴寅淑
研究了一个具有Sigmoid功能反应的捕食-被捕食模型。主要目的是研究正(共存)均衡的全局稳定性,只要它存在。最近开发的一种方法表明,与该模型相关的是一个隐式定义的函数,它在确定正平衡点的全局稳定性方面起着重要的作用。通过分析和几何分析,我们证明了这个隐式定义函数的一个关键性质是由正平衡点的局部稳定性决定的。利用这一关键性质,我们可以证明,正平衡点的全局和局部稳定性,无论何时存在,都是等价的。我们认为我们的方法可以推广到研究具有其他类型功能反应的捕食者-食饵模型正平衡点的全局稳定性。
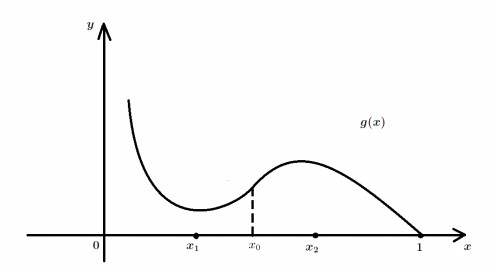
图3.1。
数字(1)
HTML视图(1876) PDF下载(683) 引用人(0)
/