总结
简介
材料和方法
使用气泡的流动可视化
升力和阻力测量
结果
现有假设的测试

扑翼附近流动的Navier–Stokes方程

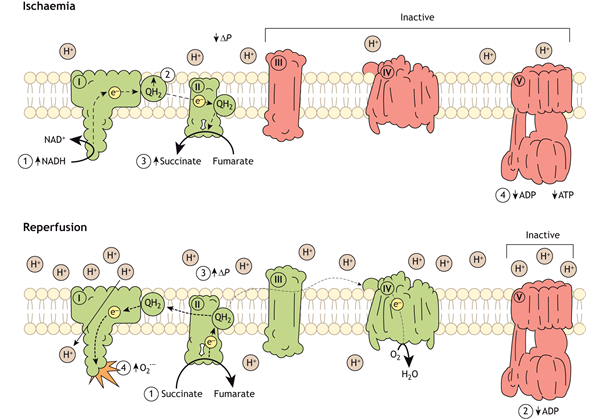
![(A) 用于分析平移和旋转机翼上流体加速度的框架。执行机构盘的面积在模型内是恒定的。Rg是回转半径,sg是在整个冲程中以Rg移动的弦长数,V(r)是沿机翼半径r的速度分布,向心加速度acen和科里奥利加速度aCor。注意,uloc是翼状框架中的局部速度,Ωstroke是由于冲程引起的角速度,\batchmode\documentclass[fleqn,10pt,legalpaper]{article}\usepackage{amssymb}\usebackage{asfonts}\userpackage{amath}\pagestyle{empty}\begin{document}\({\dot{{\Omega}}}\)\end{文档}笔划是由冲程引起的角加速度,r是流体颗粒在旋转框架中的位置。](https://cob.silverchair-cdn.com/cob/content_public/journal/jeb/212/16/10.1242_jeb.022269/6/m_jeb022269f3.jpeg?Expires=1718762542&Signature=D1GNl6Py7dDLPx~gW3t9Ghf~VaVpygnq0c7kNO8XCrZnmNeV~cIUaZMHMbsc7~eE3CgBDxFrwD~keIA4yEs-E2bQVFZa24G5ot8D96HLGGWJ-CqDZ~E-gVbS9Zc3~~wAW5iha9jirrUVeHf18tpu2RI9lWUXOp6Aj42xWCFBA2nj8fiAcPmpnQ1xZ3uPO6OrBS8HioI1XruyD5SnIaSDzJrbJo-O7I3JI2pwd1mTQ~mD8NTViW7WPvpgqBycrkWjkBRNM5hW2XzVW360u2D8B6PZ0AHaZks-~zUr7H6Z5lOjAYHt70yuDOKuo4ufNoZ83lj2ObgRgSb2XqaKMEWQjA__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)
LEV动力学对无量纲数的依赖性





力系数对无量纲数的依赖性
扑翼、旋转和平移飞翼的功效

讨论
一阶Rossby数介导稳定LEV
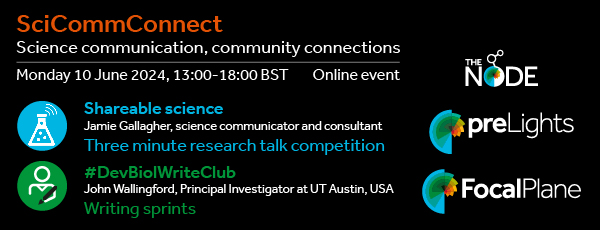
![旋转圆盘上的边界层[根据Vanyo(Vanyo1993)]。旋转边界层通常称为埃克曼层,而朝向机翼的轴向流,需要平衡径向流,称为埃克曼抽吸。边界层速度剖面是自相似的,因为它以角速度乘以径向距离进行缩放。因此,所示速度剖面描述了整个速度场。压力场是旋转对称的,不随半径变化;它只随与阀盘的轴向距离而变化。因此,支撑科里奥利和离心加速度所需的力完全是由摩擦力引起的,摩擦力与速度梯度成正比。虽然在惯性(实验室)参考系中求解旋转机翼上的Navier–Stokes方程实际上是不可能的,因为需要进行表面跟踪,但在旋转圆盘的特殊情况下,最容易在惯性(实验)参考系下求解方程。原因是圆盘表面填满了一个无限平面,不需要跟踪,这大大简化了数学。注意,Ω是圆盘和粘附在圆盘上的流体颗粒的角速度,Ω′<Ω;r、 径向矢量;urad,径向速度;acen,向心加速度;aCor,科里奥利加速度;fCor,归一化科里奥利力;fcen,归一化向心力。](https://cob.silverchair-cdn.com/cob/content_public/journal/jeb/212/16/10.1242_jeb.022269/6/m_jeb022269f10.jpeg?Expires=1718762542&Signature=RIgfFNAp20FVXC9fqi4fJEhZfEr-6bfHwPAu5x3DvuLZGGkFFG2UBap8v4fhhVI4884Lx7dnTDqJ2VQComBqoH9AiA3kWq66d6T57ShGSdCH~fW3d9Az-Q4YqAJ1aMjLUMkYc4VYlcdVo3gVQqSCX7YUZ03fHmLdtavyATBi3m6yxfCv4Ozhhl1nL3syAr9nE~dkTYh-lC8JIdO6tCqDtGGxtn0J1~ckkWSsLj60krWkau4KTTF27HlmuNOREHvhVvRdDYITpjhD68Y51~C3DxYJ9-O4fJezoTMUss08osygIpWlZcHjSv99sRopQ-9WTtPYr~Y0W74iY6~uUdOzhA__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)

LEV完整性由以下因素调节 重新 和 A类 *
新旧LEV稳定性假设的比较

Rossby数和“准静态”升力理论之间的联系
雷诺数高于14000时的升力增加
自然界和技术中旋转机翼的增力
附录1
从昆虫到鸟类的动物翅膀的罗斯比数
附录2
之间的关系 Ro公司 、质量和 重新

α 机翼迎角 α0 机翼迎角振幅 Φ0 机翼冲程振幅(总冲程振幅的一半Φ) ν 运动粘度 ρ 流体密度 Ω 旋转框架的角速度 Ω冲程 机翼冲程引起的角速度 \({\dot{{\Omega}}\) 旋转框架的角加速度 \({\dot{{\Omega}}}_{\mathrm{stroke}}\) 机翼冲程引起的角加速度 Ω′ 从飞翼分离的流体的角速度 一 英国 角加速度 一 中心 向心加速度 一 科尔 科里奥利加速度 一 惰性的 相对于惯性坐标系的加速度 一 本地 相对于局部坐标系的加速度 A类 * 冲程振幅 应收账 翼尖-翼尖展弦比 应收账 秒 单翼展弦比 b条 爆裂涡( 图4 ) b条 秒 单翼翼展 c(c) 平均翼弦长度 C类 修正系数机翼展弦比数据 C类 L(左) 升力系数 C类 D类 阻力系数 C类 D0(数字0) 零升力阻力系数 计算流体力学 计算流体动力学 D类 阻力 D类 和弦 弦向阻力 DPIV公司 数字粒子图像测速 埃克 埃克曼数 (f) 中心 比向心力(单位体积) (f) 科尔 科里奥利比力(单位体积) 克 引力常数 J型 预付款比率 L̄ 时间平均升力 L(左) 升力 列维 前缘涡 米 群众 N个 实验次数 第页 半径矢量大小 第页 流体颗粒在旋转框架中的位置 R(右) 机翼半径 R(右) 克 机翼回转半径 重新 雷诺数 重新 克 回转半径处的雷诺数 Ro公司 罗斯比数 有效值。 均方根 秒 以弦长表示的行驶距离 S公司 单翼面积 某人 螺旋爆裂涡( 图4 ) 标准差。 标准偏差 秒 克 在以下位置移动的弦长数 R(右) 克 在全冲程期间( 图3 ) U型 克 回转半径处的平均速度 u个 本地 局部坐标系中的速度 V(V) 沿机翼半径的速度 W公司 重量 ( x、 y,z ) 局部坐标系