2实验
2.3.涡旋结构的数字目标跟踪
从三维流场测量得出的相干流结构和旋涡脱落拓扑结构的分析通常局限于一个或多个时刻的等表面轮廓的定性描述(例如Zhu等人。 证明人朱、王、王和王2017; 埃什巴尔等。 参考Eshbal、Kovalev、Rinsky、Greenblatt和van Hout2019一; 肖贝贝格等。 参考文献Schobesberger、Lichtneger、Hauer、Habersack和Sindelar2020; van Hout公司等。 参考van Hout、Hershkovitz、Elsinga和Westerweel2022). 这些插图当然是合理的,因为它们对我们的基本过程理解或数值结果的验证非常重要。然而,观察孤立的时间瞬间忽略了高分辨率数据中包含的时间和空间信息。空间和时间信息的定量组合有助于深入了解和更深刻地描述潜在的流动现象。本文实现的方法基于相干流结构作为不同数字对象的可视化表示(例如等值面图),确定涡旋轨迹,从而确定传播方向、速度和稳定性假设。应该提到的是,该程序需要具有相关大小的结构,并且可能需要根据研究目标进行具体的调整。
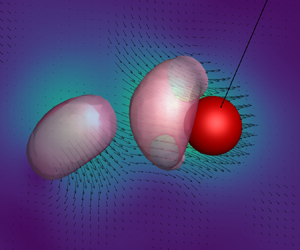
在本文中,通过涡度量级的等值面显示了显著的流动结构。等值面图像为进一步的DOT奠定了基础,特别强调了正确选择等值面值。这对于不同比率的无偏可比性至关重要 百万美元^*$和涡度量级$\欧米茄$因此,所采用的基于涡度的等表面值基于实验确定的第一次振荡周期(T美元$)和经验关系$|\omega|=16T^{-1}$。如所示图2(b条),其中较高的值为$T^{-1}$表示与较高水平相关的较短时期百万美元^*$值。人们当然可以使用不同的涡流识别标准,因为正确选择阈值会导致独立于所选标准的类似表示(Chakraborty、Balachandar和Adrian参考Chakraborty、Balachandar和Adrian2005). 将获得的等表面图像导入Wolfram Mathematica 12并进行进一步处理。首先,对每个图像进行基于阈值二值化和颜色否定的语义分割。这导致了根据像素强度构造“0”(白色)和“1”(黑色)图像。此外,还为计数超过2000像素的连接区域计算了边界框。此过程将消除除大型相干等曲面以外的所有对象。涡流轨迹是根据边界框坐标导出的。因此,包括基于记录频率的时间信息允许进一步分析涡流传播速度。图2(一)显示了DOT的应用程序,其中显示了两个大小相等的漩涡及其相应的边界框,以及之前时间点的轨迹。绘制的轨迹描述了红色高亮显示的涡环的分离和向下运动,而黑色的涡环停留在圆形路径上。
百万美元^*$和涡度量级$\欧米茄$因此,所采用的基于涡度的等表面值基于实验确定的第一次振荡周期(T美元$)和经验关系$|\omega|=16T^{-1}$。如所示图2(b条),其中较高的值为$T^{-1}$表示与较高水平相关的较短时期百万美元^*$值。人们当然可以使用不同的涡流识别标准,因为正确选择阈值会导致独立于所选标准的类似表示(Chakraborty、Balachandar和Adrian参考Chakraborty、Balachandar和Adrian2005). 将获得的等表面图像导入Wolfram Mathematica 12并进行进一步处理。首先,对每个图像进行基于阈值二值化和颜色否定的语义分割。这导致了根据像素强度构造“0”(白色)和“1”(黑色)图像。此外,还为计数超过2000像素的连接区域计算了边界框。此过程将消除除大型相干等曲面以外的所有对象。涡流轨迹是根据边界框坐标导出的。因此,包括基于记录频率的时间信息允许进一步分析涡流传播速度。图2(一)显示了DOT的应用程序,其中显示了两个大小相等的漩涡及其相应的边界框,以及之前时间点的轨迹。绘制的轨迹描述了红色高亮显示的涡环的分离和向下运动,而黑色的涡环停留在圆形路径上。
图2。(一)漩涡跟踪的示例图像显示了两个大小相等的漩涡及其相应的边界框,以及之前时间步的轨迹。(b条)基于第一次振荡周期的涡结构可视化的等表面值。