Click above“ Kaiyuan Cooperative ”Follow us

|Reprinted from: Hexing UAV Technology
Introduction to Open Source Flight Control
Open source flight control is an autonomous flight controller project based on the open source idea. It has rich learning materials, customized function development, rich use functions and strong interest. It includes both open source software and open source hardware, while software includes firmware in flight control hardware and ground station software.
Rich sensor interfaces enable open source flight control to have different sensor device support and customized development in different use scenarios.
With the continuous development of the open source flight control system, the open source flight control system has its own open source hardware, development environment and community. It adopts a fully integrated hardware architecture and has made improvements to many hardware, including the main control processor; Accelerometer, gyroscope and magnetometer integrated inertial measurement unit (IMU).
Flight control is the core of a UAV. However, without the assistance of other external devices, the UAV cannot fly normally with the change of use scenarios.
The following connection diagram system shows the common hardware equipment connection of UAV flight control, and describes the use function of each component. It can realize smooth autonomous flight, high-precision positioning, ground station parameter adjustment, data and video transmission, autonomous obstacle avoidance, indoor positioning, precise landing and other flight functions.
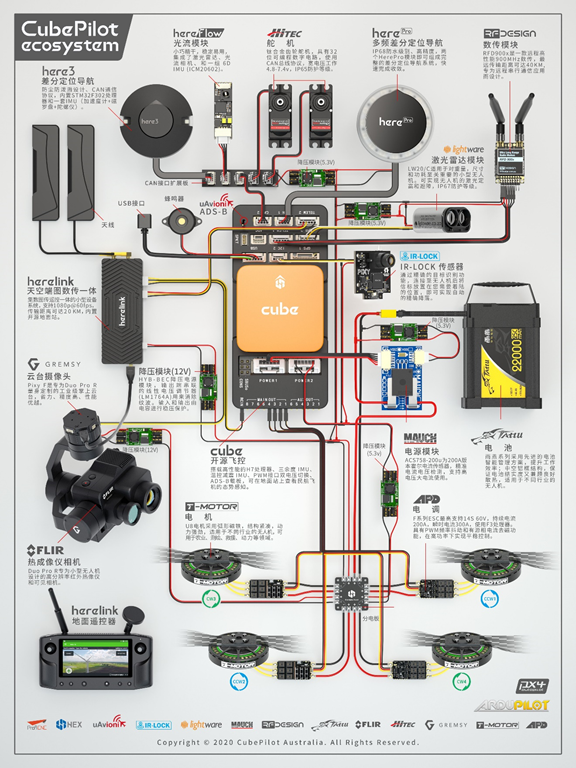
Cube open source flight control equipment connection diagram
Equipment module introduction
Cube open source flight control:
Equipped with high-performance STM32H753 main processor and STM32F100 coprocessor chip, it has high-speed data computing capability, expands rich sensor interfaces, and can connect corresponding sensors in different scenarios to provide more options and applications for flight. The open-source firmware used by flight control can support a variety of models, including: unmanned vehicles, unmanned ships, multi rotor wings, fixed wings, vertical takeoff and landing fixed wings, helicopters, submarines. It supports advanced flight modes such as autonomous routes, key points surrounding, mouse guidance, FollowMe, and autonomous participation adjustment. Dual redundant power interface, power module 5.3V power supply.
USB:
It can burn firmware and adjust parameters for flight control.
Buzzer:
Send out different combinations of prompt tones to prompt the current status of flight control.
High precision multi frequency differential positioning navigation GPS:
With CAN interface communication, the equipment is divided into base station and mobile station. The carrier phase dynamic real-time differential technology, namely RTK technology, is used to provide the three-dimensional coordinates of observation points in real time, and send the carrier phase collected by the reference station to the user station for difference calculation and calibration, That is, the user station receives the GPS satellite carrier phase and the carrier phase from the reference station to form a phase difference observation value for real-time processing, and gives centimeter level positioning accuracy, which greatly improves the precise flight of the UAV when performing tasks. (The power supply of Here3 is 5.3V, and the external power supply of HerePro is 5.3-40V. The maximum compatible voltage is 60V)
Optical flow positioning module:
The CAN interface communication is used to integrate the laser radar, optical flow camera and 6D IMU (ICM20602). The laser radar is used for better height detection and accurate landing detection, and the X and Y motion axes are captured with the optical flow camera and the 6D IMU is used for attitude angle detection, thus forming a complete optical flow positioning system, which can be used for position positioning without GPS. 5.3V power supply.
CAN steering gear:
Select the equipment module, which can usually be used for some fixed devices, dropping devices and mechanical arms that use the equipment.
Data transmission module:
It is used for communication between flight control and ground station. As a way of data transmission and control, it can be used as a remote serial communication device, with the maximum transmission distance of 40KM and power supply of 5.3V.
Herelink image data transmission and remote control integrated equipment:
It has the functions of data transmission, video return, ground station tuning and participation control, remote controller control, etc., which enables the integration and miniaturization of multiple complex equipment. It can input two-way high-definition video, and the transmission distance can reach 20KM. 6-12.6V power supply.
PTZ and camera equipment:
When using the camera head, the camera head can increase the stability effect for the camera during the flight of the UAV, making the returned video of the HD camera stable and clear. The head and camera can be determined according to the rack type and rack size, and the camera can use the HD camera and infrared camera. PTZ power supply is 12V.
Lidar module:
It can be connected to flight control serial port or I2C communication, and can realize accurate laser height determination and obstacle avoidance of UAV, with 5.3V power supply.
IR-LOCK precision landing module:
It is divided into infrared locking sensor and infrared beacon. The infrared locking sensor is connected to the I2C interface of flight control for communication. The infrared locking sensor is installed in the middle of the bottom of the UAV, with the lens facing the ground, and the infrared beacon is placed at the landing position. Under the LAND landing mode, the infrared locking sensor will detect the infrared beacon on the ground and achieve accurate landing. 5V power supply.
Power battery:
The battery is the source of power supply for all equipment in the UAV, so it is necessary to select a good and stable battery. How many times it is discharged during the actual flight depends on the power of the electric harmonic motor and the current consumption of other loads. It is better to choose a regular brand battery to ensure the battery's storage performance, discharge performance and heat dissipation performance.
Power module:
The power module is mainly used for accurate current and voltage detection. The current and voltage of the battery can be viewed in real time on the ground station. According to the different battery voltages used by UAVs, the corresponding power module should also choose the appropriate voltage.
Step down module:
It mainly converts large voltage to small voltage to supply power to other low-voltage equipment in the flight system. The conversion voltage in the connection diagram is 5.3V or 12V.
Brushless electric regulation:
The full name of the electronic governor is to regulate the start, stop and speed of the motor according to the control signal. The highest use current will be marked on the electrical regulator, such as 200A, 14S (use voltage). The electrical regulator is usually selected according to the KV value and power of the motor.
Brushless motor, blade:
Brushless motor is mainly composed of stator and rotor. The main parameters of the motor are xxxxKV, xxxx, for example: 8727150KV, 8727 represents the stator size of 87mm X 27mm (diameter of motor rotor X height of motor rotor), 150KV value: motor speed (no-load)=KV value X voltage; For example, the rotational speed (no-load) of KV150 motor under 50V voltage is 7500 rpm. The main advantages of brushless motor are high efficiency, stability and long service life. The motor plays the role of providing kinetic energy in the whole flight system, and the blade is a device that converts the rotating power of the motor into power. In the whole flight system, blades are mainly used to provide the kinetic energy required for flight. According to the material, blades can be generally divided into nylon, carbon fiber and wood. The blades of the electric regulating motor are matched with each other, and they should be selected according to the use scenarios and requirements.
The current open source flight control system has innovated in software, artificial intelligence and cloud applications. It has advanced flight functions such as high-precision positioning, cluster flight, image recognition, autonomous obstacle avoidance, automatic tracking flight, and is developing towards machine vision, clustering, and platform based development process.
The development of open source flight control has gathered the wisdom of hundreds of thousands of excellent developers, which can develop such a powerful product in just a few years. Although open source flight control will develop in different ways in the future, I believe there will be a better tomorrow waiting for us to explore, which is the common vision of many flight control enthusiasts. Today, with the rapid development of artificial intelligence technology and image recognition technology, open source flight control will also follow the pace of development to a more intelligent era. Have expectations and love.
*The pictures in this article are from the network. If there is infringement, please contact to delete!
Introduction to Kaiyuan News Agency
The Open Source Society is a manufacturer neutral, volunteer and non-profit open source alliance organized by enterprises, communities and individuals at home and abroad who support open source in accordance with the principle of "contribution, consensus and co governance", aiming to jointly create a healthy and sustainable open source ecosystem and promote the Chinese open source community to become an active participant and contributor of global open source software. We focus on open source governance, international integration, community development and open source projects.
Related reading | Related Reading

Summer 2020 "Big Stars Talk about Open Source" | Chen Lijun: How Far Is Linux from Getting Started to Deepening the Kernel

GPL2.0 protocol
Summer 2020 "Big Stars Talk about Open Source" - Wu Sheng | How to be an Open Source Player
In summer 2020, Zhuang Biaowei&Lin Lvqiang, "Big Masters Talk about Open Source": What are the open source stories in your life experience?
This article is shared from the WeChat official account Kaiyuan She.
In case of infringement, please contact support@oschina.cn Delete.
Participation in this article“ OSC Source Innovation Plan ”, welcome you to join us and share with us.
















































