几个观察结果:
- 当蚂蚁在任何恒定速度的区域(任何较小的方格)中移动时,都应该沿直线移动,因为这是任何两点之间最短(因此也是最快)的路径。
- 任何最短路径都必须是可逆的。如果蚂蚁要后退回到起点,它们应该能够沿着同样的路径返回。这意味着我们的解应该具有对称性!
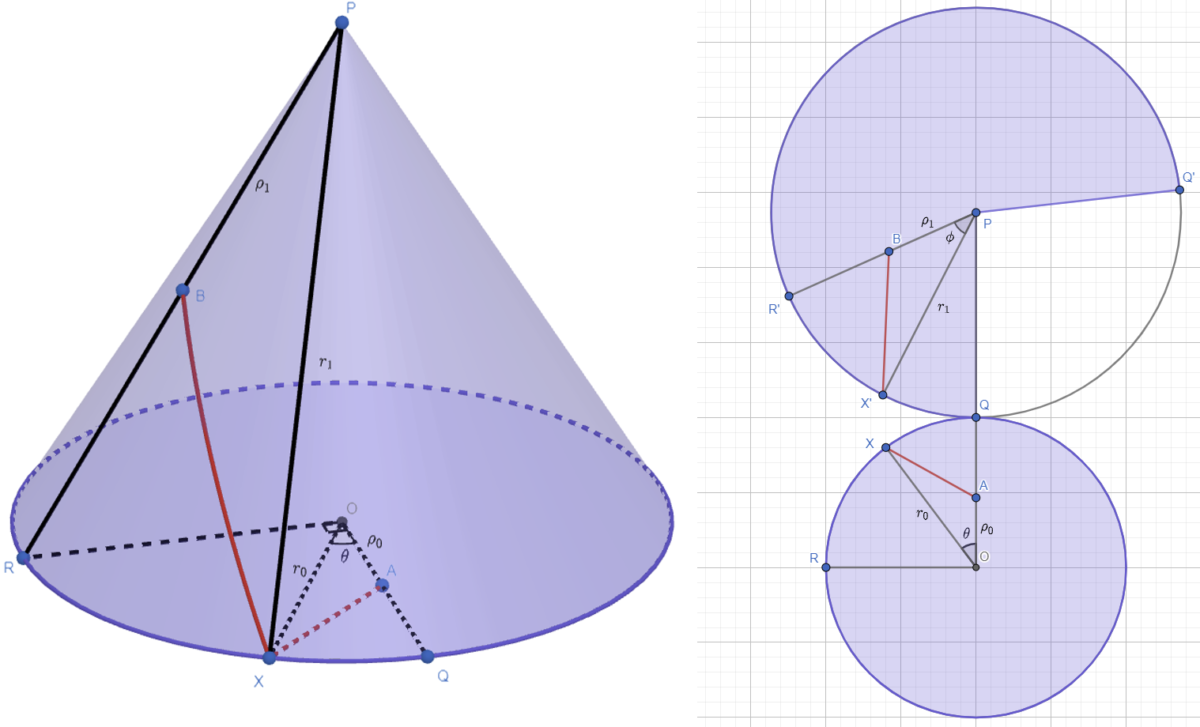
假设速度在白色方块中为$1$,在黑色方块中为$\eta$。从上面可以清楚地看出,我们可以通过一个变量$x$参数化通过板的所有路径,如下图所示。

因为时间是距离除以速度,所以穿越黑色方块所花费的时间就是距离除以$\eta$。同时,穿越白色方块的时间就是距离(我们假设速度为1)。这使得总时间等于:
\[
f(x)=\frac{2}{\eta}\sqrt{1+x^2}+\sqrt}\,(1-x)
\]取导数并将其设为零,我们发现$x$的最佳值和最佳关联时间为:
\[
x_\star=\frac{\eta}{\sqrt{2-\eta ^2}}}
f(x_\star)=\sqrt{2}\左(1+\frac{\sqrt}2-\eta^2}}{\eta}\右)。
\]为了回答所提出的问题,我们应该用$\eta=0.9$替换,我们发现$x\约为0.825$cm,遍历所用的时间约为$3.12835$分钟。
替代推导:斯内尔定律!
事实证明,这个问题可以通过光学镜头来观察(没有双关语的意思)!当光线穿过两种不同介质之间的界面时,它遵循一条时间最短的路径。
这被称为费马最小时间原理它导致了物理学中的一个公式斯内尔定律:入射角的正弦比等于两种介质之间的速度比。在我们的例子中,如下图所示,公式如下
\[
\裂缝{\sin{\theta_1}}{\sin}\theta_2}}=\ta
\]

根据这个图,我们可以看到$\sin{\theta_1}=\frac{x}{\sqrt{1+x^2}}$和$\sin}\theta_2}=\sin{tfrac{\pi}{4}}=\frac{1}{\scrt{2}}$。因此,Snell定律暗示
\[
\压裂{x}{\sqrt{1+x^2}}=\frac{\eta}{\scrt{2}}
\]求解$x$,我们得到了与前面推导的完全相同的公式!
额外信贷
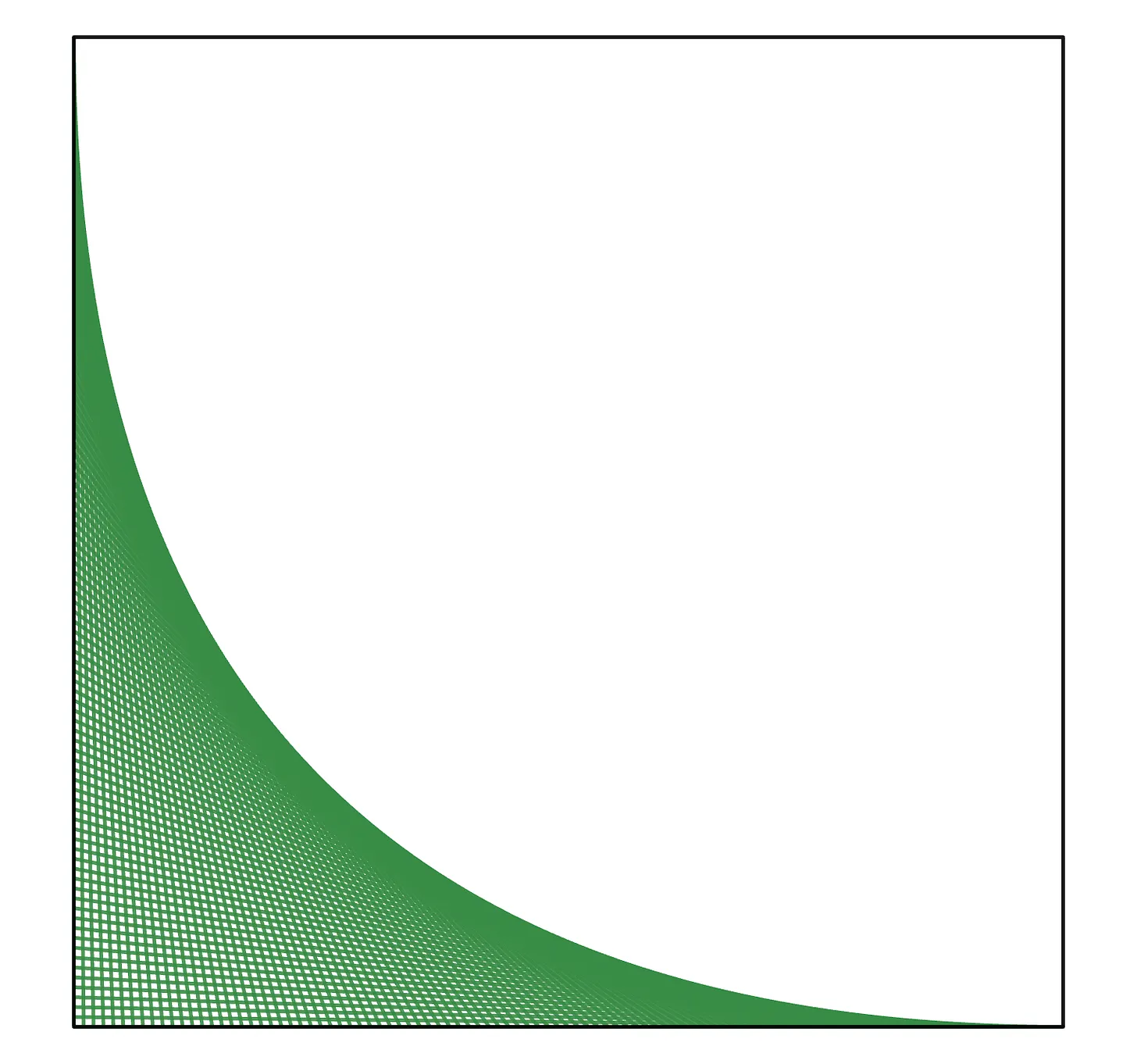
让我们考虑一个更一般的情况,棋盘是$2n\乘以2n$。问题是关于$n=4$的情况,但我们将研究一般情况。对于更复杂的几何图形,目前还不清楚路径应该是什么样子,以及交叉点应该出现在哪里。然而,我们可以做出一些合乎逻辑的推断。
如果我们最初移动到$(1,0)$,然后沿直线对角线移动到$2n,2n-1)$,则整个对角线部分将位于白色方块上。任何比这条对角线走得更远的路径都需要花费更多的时间,并且可以被排除在外。因此,我们得出结论,整个路径必须包含在下面的阴影区域中。

事实上,红色区域跨越了所有$\eta$的所有最佳路径的范围。
- 当$\eta=1$时,所有方块的速度都相同,因此最快的路径是从起点到终点的直线(红色区域的中间)。
- 当$\eta\到0$时,黑色方块比白色方块慢得多,因此我们应该尽量减少在黑色方块上花费的时间。这是通过沿着红色区域的边界移动来完成的。
- 当$0\lt\eta\lt 1$时,最佳路径介于两者之间!
通过对称性,我们可以进一步将路径限制在下半部分。我们可以看到,对于一个$2n乘以2n$的平方,将有$4n-2$的接口交叉,它们将以镜像对的形式出现。这就留下了2n-1$的未知数。我们将为其贴上标签,如下所示:

由于解的对称性,交点的出现顺序如下:
\[
x_1,x_2,\点,x{2n-1},x{2-1}。\点,x2,x_1。
\]最后,总时间由表达式给出:
\开始{multline}
f(x)=\frac{2}{\eta}\sqrt{1+x_1^2}+\sqrt{2}\,\bigl(1-x{2n-1}\biger)\\
+\sum_{k=0}^{n-2}左(2\sqrt{(1-x_{2k+1})^2+(1-x{2k+2})
+\frac{2}{\eta}\sqrt{x_{2k+2}^2+x_{2k+3}^2}\ right)
\结束{multline}注释当$n=1$(第一个问题的$2×2$情形)时,总和为空,$x1=x{2n-1}$,我们从第一部分恢复$f(x)$。
此时,我们必须再次求导数(这次是梯度!),并将它们全部设为零,然后求解$x_1,\dots,x_{2n-1}$的后续方程。这不是一件简单的事情,所以我求助于Mathematica来从数值上找到解决方案。
当$\eta=0.9$时,最佳时间约为11.78815分钟,最佳交叉口为:
\[
x_1\约0.48571,四x_2 \约0.073789,四x_3\约0.057876,四x_4=x_5=x_6=x_7=0。
\]所以最后四个交叉点为零。零??或者只是接近于零的东西?这将带我们进入奖金部分…
阶段转换疯狂!
我们之前提到过,当$\eta\to 1$时,直接对角线路径是最优的,这意味着$x_k\to 1$for all$k$。此外,当$\eta\到0$时,红色区域的边界是最佳的,因此$x_k\到0$for all$k$。那么$\eta$的中间值会发生什么呢?起初,我希望随着$\eta$的增加,所有$x_k$都会逐渐从$0$迁移到$1$,但我错了!
实际发生的情况是,$x_k$一直保持在$0$,直到超过某个$\eta$阈值,此时它们从零开始移动。每个不同的$x_k$都有不同的$\eta$阈值(!!)
这里是$x_1,\dots,x_7$的图,它们是$\eta$在$8\乘以8$情况下的函数。

因此,大多数$x_k$在大多数情况下都是零,直到$\eta$接近$1$。让我们放大到情节的有趣部分:

因此,当$\eta=0.9$时,只有$x_1、x_2、x_3$是非零的,正如我们之前发现的那样。但当$\eta=0.98$时,所有$x_k$都是正数!$\eta$阈值成对出现在$x_1$之后,即$x_2、x_3$同时变为非零,$x_4、x_5$也是如此。这是因为我们如何定义$x_k$。当$x_{2k}=0$时,这将强制$x{2k+1}$也为零。
第一句话:机器学习中也会出现这种现象,即改变参数可能导致最佳向量的分量以一种看似突然的方式从零变为非零。具体来说,在L1规则化最小二乘中(拉索正则化),当我们改变正则化参数$\lambda$时,最优向量$x$从稀疏过渡到具有类似突变阈值的稠密。相应的图称为正则化路径.
最后备注:虽然我们只看了8美元乘以8美元的情况,但这个图实际上告诉了我们任何$n$的值(前提是$\eta$不太大)!例如,假设我们想用$\eta=0.96$来解决$500\乘以500$的情况。根据我们的图,我们只需读出$x_1,\dots,x_5$的值(它们与$8\times 8$的情况相同),剩下的$x_k$将为零。唯一需要注意的是,如果我们想解决一个$\eta\gt 0.97$(这大于$x_7$的阈值)的情况,那么我们需要解决一个更大的网格,以便能够找到丢失的阈值。
解析计算第一阈值
计算下一个$x_k$变为非零的$\eta$的精确值不是一件容易的任务。在Mathematica的帮助下,我发现第一个阈值出现在
\[
117\eta^8-576\eta~6+1080\eta_4-896\eta ^2+272=0
\]它的精确值为:
\[
\eta_1=
\sqrt{\frac{2}{39}\左(24-\sqrt{\salpha}-\sqrt{\sfrac{276}{\sqrt}\alpha}}-\alpha-27}\右)}\约0.885416,
\]其中$\alpha:=13\cdot3^{2/3}-9\约18.0411$。
我也尝试过计算$\eta_2$,但事实证明它要困难得多!