基于图字典的低阶分解结合纹理特征提取的高光谱异常检测


摘要
1.简介
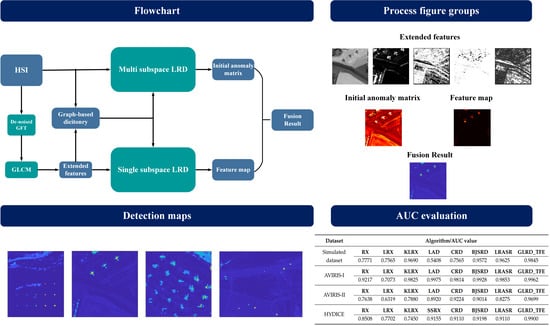
(1) 提出了一种带有新型图形字典的低秩分解模型。 我们通过图拉普拉斯矩阵结合图傅里叶变换来构造背景字典。 它利用了空间连通性和光谱相关性的优点,在不计算高维协方差矩阵和逆矩阵的情况下保留了主要的背景分量。 (2) 据我们所知,HSI的纹理特征首次用于异常检测。 设计了一种基于纹理特征的LRD操作来分离稀疏特征像素并生成特征映射。 它与HSI的原始检测结果进行融合,以增强背景与异常之间的对比度,并使检测结果更加准确。 (3) 充分利用异常目标的稀疏性和异常与背景的光谱差异,提出了在空间和光谱上区分目标的方法。
2.建议方法
2.1. 异常检测的低秩分解模型
2.2. 基于图拉普拉斯矩阵的词典构造
2.3. 图模型的权重选择
2.4. 单个子空间LRD的纹理特征提取
(i) 第二瞬间: (ii) 对比度: (iii) 熵: (iv) 相关性:
3.实验结果与分析
3.1. HSI数据集描述
3.2. 检测性能
4.参数讨论
5.结论
作者贡献
基金
利益冲突
工具书类
D.W.斯坦因。; 比文,S.G。; 霍夫,L.E。; 温特,E.M。; Schaum,A.P。; Stocker,A.D.从高光谱图像中检测异常。 IEEE信号处理。 美格。 2002 , 19 , 58–69. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 戈茨,A.F。; 叶片,G。; 所罗门,J.E。; Rock,B.N.地球遥感成像光谱法。 科学类 1985 , 228 , 1147–1153. [ 谷歌学者 ] [ 交叉参考 ] [ 公共医学 ] 杜,B。; Zhang,L.基于随机选择的高光谱图像异常检测器。 IEEE传输。 地质科学。 远程传感器。 2011 , 49 , 1578–1589. [ 谷歌学者 ] [ 交叉参考 ] Khazai,S。; Safari,A。; 莫哈拉迪,B。; Homayouni,S.高光谱图像中的亚像素异常检测方法。 IEEE J.选择。 顶部。 申请。 地球目标遥感。 2013 , 6 , 769–778. [ 谷歌学者 ] [ 交叉参考 ] 里德,I.S。; Yu,X.未知光谱分布的光学图案的自适应多波段CFAR检测。 IEEE传输。 阿库斯特。 语音信号处理。 1990 , 38 , 1760–1770. [ 谷歌学者 ] [ 交叉参考 ] Chen,J.Y。; 里德,I.S.杂波中光学目标的检测算法。 IEEE传输。 Aerosp.航空公司。 电子。 系统。 1987 , 23 , 46–59. [ 谷歌学者 ] [ 交叉参考 ] Kwon,H。; Nasrabadi,N.M.Kernel RX算法:高光谱图像的非线性异常检测器。 IEEE传输。 地质科学。 远程传感器。 2005 , 43 , 388–397. [ 谷歌学者 ] [ 交叉参考 ] Wright,J。; 杨,A.Y。; Ganesh,A。; Sastry,S.S.公司。; Ma,Y.通过稀疏表示的鲁棒人脸识别。 IEEE传输。 模式分析。 机器。 智力。 2009 , 31 , 210–227. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 杨,J。; Wright,J。; 黄,T。; Ma,Y.图像超分辨率作为原始图像补丁的稀疏表示。 2008年6月23日至28日,美国阿拉斯加州安克雷奇,IEEE计算机视觉和模式识别会议(CVPR)论文集; 第1-8页。 [ 谷歌学者 ] 陈,Y。; 新墨西哥州纳斯拉巴迪。; Tran,T.D.高光谱图像中目标检测的稀疏表示。 IEEE J.选择。 顶部。 信号处理。 2011 , 5 , 629–640. [ 谷歌学者 ] [ 交叉参考 ] 李伟(Li,W.)。; Du,Q.高光谱异常检测的协作表示。 IEEE传输。 地质科学。 远程传感器。 2014 , 53 , 1463–1474. [ 谷歌学者 ] [ 交叉参考 ] 李,J。; 张,H。; 张,L。; 利用背景联合稀疏表示进行高光谱异常检测。 IEEE J.选择。 顶部。 申请。 地球目标遥感。 2015 , 8 , 2523–2533. [ 谷歌学者 ] [ 交叉参考 ] Sun,W。; 刘,C。; 李,J。; 赖,Y.M。; Li,W.基于低秩和稀疏矩阵分解的高光谱图像异常检测。 J.应用。 远程。 传感器。 2014 , 8 , 083641. [ 谷歌学者 ] [ 交叉参考 ] Zhang,Y。; 杜,B。; 张,L。; Wang,S.一种基于低秩稀疏矩阵分解的马氏距离方法,用于高光谱异常检测。 IEEE传输。 地质科学。 远程传感器。 2015 , 54 , 1376–1389. [ 谷歌学者 ] [ 交叉参考 ] Xu,Y。; 吴,Z。; 李,J。; A广场。; Wei,Z.基于低秩稀疏表示的高光谱图像异常检测。 IEEE传输。 地质科学。 远程传感器。 2016 , 54 , 1990–2000. [ 谷歌学者 ] [ 交叉参考 ] 刘,G。; 林,Z。; 严,S。; Sun,J。; Yu,Y。; Ma,Y.通过低秩表示实现子空间结构的稳健恢复。 IEEE传输。 模式分析。 机器。 智力。 2013 , 35 , 171–184. [ 谷歌学者 ] [ 交叉参考 ] [ 公共医学 ] [ 绿色版本 ] Song,S。; 周,H。; 顾,L。; Yang,Y。; Yang,Y.通过基于张量的端元提取和低秩分解进行高光谱异常检测。 IEEE地质科学。 远程。 Sens.Lett公司。 2019 , 17 , 1772–1776. [ 谷歌学者 ] [ 交叉参考 ] 曲,Y。; Wang,W。; 郭,R。; Ayhan,B。; 关,C。; Vance,S。; Qi,H.通过光谱分解和基于字典的低阶分解进行高光谱异常检测。 IEEE传输。 地质科学。 远程传感器。 2018 , 56 , 4391–4405. [ 谷歌学者 ] [ 交叉参考 ] 李,F。; 张,X。; 张,L。; 江,D。; Zhang,Y.利用结构化稀疏性进行高光谱异常检测。 IEEE传输。 地质科学。 远程传感器。 2018 , 56 , 4050–4064. [ 谷歌学者 ] [ 交叉参考 ] 巴特里纳,A.V。; Oppus,C.使用蚁群优化的图像边缘检测。 WSEAS变速器。 信号处理。 2010 , 6 , 58–67. [ 谷歌学者 ] 毛,Q。; Wang,L。; Tsang,I.W。; Sun,Y.基于反向图嵌入的主图和结构学习。 IEEE传输。 模式分析。 机器。 智力。 2016 , 395 , 2227–2241. [ 谷歌学者 ] [ 交叉参考 ] 巴恩斯,J.A。; Harary,F.网络分析中的图论。 Soc.网络。 1983 , 5 , 235–244. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 桑特纳,J。; Pock,T。; Bischof,H.交互式多标签分割。 在 2010年11月8日至12日在新西兰昆士敦举行的亚洲计算机视觉会议,《2010年ACCV会议记录:计算机视觉》 ; 施普林格:德国柏林/海德堡,2010年; 第397-410页。 [ 谷歌学者 ] Akoglu,L。; Tong,H。; Koutra,D.基于图形的异常检测和描述:一项调查。 数据最小知识。 发现。 2015 , 29 , 626–688. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] Verdoja,F。; Grangetto,M.Graph Laplacian用于图像异常检测。 机器。 视觉。 申请。 2020 , 31 , 11. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 赵,R。; Zhang,L.GSEAD:高光谱异常检测的图形评分估计。 IEEE J.选择。 顶部。 申请。 地球目标遥感。 2016 , 10 , 725–739. [ 谷歌学者 ] [ 交叉参考 ] 袁,Y。; 马·D。; Wang,Q.通过图形像素选择进行高光谱异常检测。 IEEE传输。 赛博。 2015 , 46 , 3123–3134. [ 谷歌学者 ] [ 交叉参考 ] [ 公共医学 ] 王,X。; 新墨西哥州乔治安娜。; Petriu,E.M.使用计算机视觉技术进行织物纹理分析。 IEEE传输。 仪器。 Meas公司。 2010 , 60 , 44–56. [ 谷歌学者 ] [ 交叉参考 ] Malik,J。; Belongie,S。; 梁,T。; Shi,J.用于图像分割的轮廓和纹理分析。 国际期刊计算。 视觉。 2001 , 43 , 7–27. [ 谷歌学者 ] [ 交叉参考 ] 基奇勒,M。; 斯托拉斯,M。; 魏曼,A。; Kleinsteuber,M.基于模型的局部图像特征学习,用于无监督纹理分割。 IEEE传输。 图像处理。 2018 , 27 , 1994–2007. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 平面图,F。; 格雷西亚,G。; 加西亚·塞维利亚,P。; Mirmehdi,M。; Xie,X.遥感图像分割的多光谱纹理特征。 在 伊比利亚模式识别和图像分析会议,《2009年伊比利亚公共政策研究所会议记录:模式识别与图像分析》,2009年6月10日至12日,葡萄牙波瓦德瓦尔齐姆 ; 施普林格:德国柏林/海德堡,2009年; 第257-264页。 [ 谷歌学者 ] Liao,S。; 法律,M.W。; Chung,A.C.纹理分类的主要局部二元模式。 IEEE传输。 图像处理。 2009 , 18 , 1107–1118. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 李,J。; Xi,B。; 李毅。; 杜琪。; Wang,K.基于纹理特征增强和深度信念网络的高光谱分类。 远程传感器。 2018 , 10 , 396. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 刘,G。; 林,Z。; Yu,Y.基于低秩表示的稳健子空间分割。 2010年6月21日至24日,以色列海法,第27届国际机器学习会议(ICML-10)会议记录; 第663-670页。 [ 谷歌学者 ] 刘,G。; Yan,S.用于子空间分割和特征提取的潜在低阶表示。 2011年11月6日至13日,西班牙巴塞罗那,计算机视觉国际会议论文集; 第1615-1622页。 [ 谷歌学者 ] F.R.钟。; F.C.格雷厄姆。 谱图论 ; 美国数学学会:普罗维登斯,RI,美国,1997年; 第92卷,在线提供: http://www.math.ucsd.edu/ ~fan/research/revised.html (2020年12月3日查阅)。 Sandryhaila,A。; Moura,J.M.图上的离散信号处理:图的傅立叶变换。 2013年5月26日至31日,在加拿大不列颠哥伦比亚省温哥华举行的IEEE声学、语音和信号处理国际会议论文集; 第6167–6170页。 [ 谷歌学者 ] Chang,中央情报局。; Chiang,S.S.高光谱图像的异常检测和分类。 IEEE传输。 地质科学。 远程传感器。 2002 , 40 , 1314–1325. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 张,C。; Floríncio,D.使用基于图形的模型分析预测变换编码的最佳性。 IEEE信号处理Lett。 2012 , 20 , 106–109. [ 谷歌学者 ] [ 交叉参考 ] L.J.格雷迪。; J.R.波里曼尼。 图在计算科学中的应用分析 ; 施普林格科技与商业媒体:英国伦敦,2010年; 在线可用: https://www.springer.com/gp/book/9781849962896 (2020年12月3日查阅)。 布莱克,M.J。; 萨皮罗,G。; 玛丽蒙特,D.H。; Heeger,D.鲁棒各向异性扩散。 IEEE传输。 图像处理。 1998 , 7 , 421–432. [ 谷歌学者 ] [ 交叉参考 ] [ 公共医学 ] [ 绿色版本 ] Fracastoro,G。; Magli,E.图像压缩的预测图构建。 2015年9月27日至30日,加拿大魁北克省魁北克市IEEE图像处理国际会议(ICIP)会议记录; 第2204–2208页。 [ 谷歌学者 ] 钱,Y。; Ye,M。; Zhou,J.基于结构化稀疏logistic回归和三维小波纹理特征的高光谱图像分类。 IEEE传输。 地质科学。 远程传感器。 2012 , 51 , 2276–2291. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 张,X。; 新罕布什尔州尤南。; O'Hara,C.G.小波域统计高光谱土壤纹理分类。 IEEE传输。 地质科学。 远程传感器。 2005 , 43 , 615–618. [ 谷歌学者 ] [ 交叉参考 ] 福格拉斯,外径。; Pratt,W.K.纹理特征提取的去相关方法。 IEEE传输。 模式分析。 机器。 智力。 1980 , 4 , 323–332. [ 谷歌学者 ] [ 交叉参考 ] Soh,L.K。; Tsatsoulis,C.使用灰度共生矩阵对SAR海冰图像进行纹理分析。 IEEE传输。 地质科学。 远程传感器。 1999 , 37 , 780–795. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] Sebastian,副学士。; Unnikrishnan,A。; Balakrishnan,K.灰度共生矩阵:概括和一些新特征。 arXiv公司 2012 ,arXiv:1205.4831。 [ 谷歌学者 ] 帕里奥,M。; 克拉马里厄克,B。; Gabbouj,M。; Visa,A.使用灰度共生矩阵进行岩石纹理检索。第五届北欧信号处理研讨会论文集,挪威卑尔根,2002年10月4-7日; 第75卷。 [ 谷歌学者 ] F.R.德西奎拉。; W.R.施瓦茨。; Pedrini,H.纹理描述的多尺度灰度共生矩阵。 神经计算 2013 , 120 , 336–345. [ 谷歌学者 ] [ 交叉参考 ] 贝拉,S。; 马吉,B。; Dash,R.使用二维离散小波变换和灰度共生矩阵进行乳腺癌检测的乳腺钼靶图像分类。 神经计算 2015 , 154 , 1–14. [ 谷歌学者 ] [ 交叉参考 ] R.M.哈拉利克。; Shanmugam,K。; Dinstein,I.H.图像分类的纹理特征。 IEEE传输。 系统。 人类网络。 1973 , 6 , 610–621. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] Kerekes,J.接收机工作特性曲线置信区间和区域。 IEEE地质科学。 遥感快报。 2008 , 5 , 251–255. [ 谷歌学者 ] [ 交叉参考 ] [ 绿色版本 ] 斯奈德,D。; 凯瑞克斯,J。; 费尔威瑟,I。; Crabtree,R。; Shive,J。; Hager,S.开发基于网络的应用程序来评估目标查找算法。 2008年7月7日至11日,美国马萨诸塞州波士顿,IGARSS 2008-2008 IEEE国际地球科学和遥感研讨会论文集; 第2卷,第II-915–II-918页。 [ 谷歌学者 ] Stefanou,医学硕士。; Kerekes,J.P.评估光谱图像效用的方法。 IEEE传输。 地质科学。 远程传感器。 2009 , 47 , 1698–1706. [ 谷歌学者 ] [ 交叉参考 ]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}