基于润滑状态预测的滚珠轴承三维DEM建模

摘要
1.简介
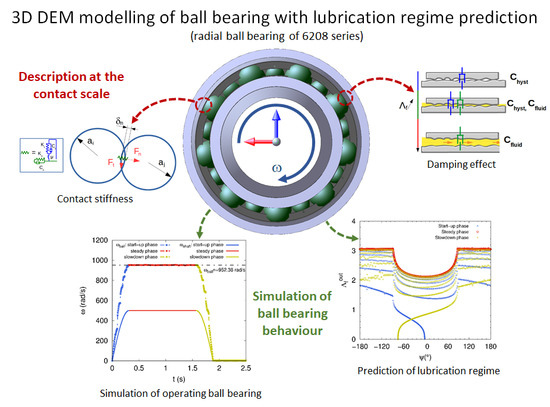
2.基于DEM的径向滚珠轴承三维建模
2.1. 接触刚度和阻尼效应
2.2. 液膜厚度和流体参数
2.3. DEM滚珠轴承模型的时空离散化
3.径向滚珠轴承工作时润滑状态的数值预测
3.1. 径向载荷和径向间隙的影响
3.2. 角速度的影响
4.结论和展望
作者贡献
致谢
利益冲突
术语
附录A径向滚珠轴承的法向载荷和径向挠度


参考文献
Sapietová,A。; Deká,V.MSC中旋转机械的动态分析。 亚当斯。 Procedia工程。 2016 , 136 , 143–149. [ 谷歌学者 ][ 交叉参考 ] 泽祖尔卡,F。; Marcon,P。; 韦斯利,我。; Sajdl,O.行业4.0——现象介绍。 国际会计师联合会-巴普。 在线的 2016 , 49 , 8–12. [ 谷歌学者 ][ 交叉参考 ] Ahuett-Garza,H。; Kurfess,T.关于工业4.0和智能制造适应技术趋势的简要讨论。 制造出租。 2018 . [ 谷歌学者 ][ 交叉参考 ] 陈,J。; Randall,R.B.使用振动模拟对内燃机轴承爆震故障进行智能诊断。 机械。 机器。 理论 2016 , 104 , 161–176. [ 谷歌学者 ][ 交叉参考 ] 格洛瓦茨,A。; 格洛瓦茨,W。; 格洛瓦茨,Z。; Kozik,J.使用声波信号对单相感应电机的轴承和定子故障进行早期故障诊断。 测量 2018 , 113 , 1–9. [ 谷歌学者 ][ 交叉参考 ] 康佩拉,K.D。; 拉奥,M.V.G。; Rao,R.S.使用定子电流频谱减法和各种小波分解技术检测三相感应电机中的轴承故障。 Ain Shams工程师。 2017 . [ 谷歌学者 ][ 交叉参考 ] Jünior,J.J.D.S。; de Farias Maribondo,J.使用红外热成像技术分析剪切摩擦试验中的润滑油。 红外物理。 Technol公司。 2018 , 89 , 291–298. [ 谷歌学者 ] 哈莫洛克,B。; Dowson,D.点接触的等温弹流润滑:第1部分:理论公式。 J.特里波尔。 1976 , 98 , 223–228. [ 谷歌学者 ][ 交叉参考 ] 哈莫洛克,B.J。; 道森,D。 滚珠轴承润滑:椭圆接触的弹性流体力学 ; John Wiley&Sons Inc.:美国纽约州纽约市,1981年。 [ 谷歌学者 ] 马斯杰迪,M。; Khonsari,M.关于点控制弹流润滑中表面粗糙度的影响:膜厚和粗糙度载荷的公式。 特里波尔。 国际。 2015 , 82 , 228–244. [ 谷歌学者 ][ 交叉参考 ] 适用于各种载荷的Stribeck,R.滚珠轴承。 事务处理。 美国航空航天局 1907 , 29 , 420–463. [ 谷歌学者 ] Downson,D。; 希金森,G.R。 弹性流体动力润滑 第2版。; 佩加蒙出版社:英国牛津,1977年。 [ 谷歌学者 ] 斯塔乔维克,G。; 巴奇勒,A。 工程摩擦学 第3版。; 爱思唯尔:美国纽约州纽约市,2005年。 [ 谷歌学者 ] 费尔南德斯,首席执行官。; 马尔克斯,P.M。; 马丁斯,R.C。; Seabra,J.H.风力涡轮机齿轮油的油膜厚度和牵引曲线。 特里波尔。 国际。 2015 , 86 , 1–9. [ 谷歌学者 ][ 交叉参考 ] 库索,T。; 格拉萨,B。; Campos,A。; Seabra,J.润滑脂老化对满油和缺油润滑下油膜形成的影响。 润滑剂 2015 , 三 , 197–221. [ 谷歌学者 ][ 交叉参考 ] Gonçalves,D。; 格拉萨,B。; Campos,A.V.公司。; Seabra,J.热老化润滑脂的膜厚和摩擦行为。 特里波尔。 国际。 2016 , 100 , 231–241. [ 谷歌学者 ][ 交叉参考 ] Gonçalves,D。; 维埃拉,A。; 卡内罗,A。; Campos,A.V.公司。; Seabra,J.H.O.润滑脂润滑粗糙接触中的膜厚和摩擦关系。 润滑剂 2017 , 5 , 34. [ 谷歌学者 ][ 交叉参考 ] 马查多,C。; Guessasma,M。; Bellenger,E.基于DEM的轴承改进2D建模,用于预测动态机械应力。 机械。 机器。 理论 2017 , 113 , 53–66. [ 谷歌学者 ][ 交叉参考 ] 塔迪纳,M。; Boltezar,M.改进了滚珠轴承模型,用于模拟试车期间故障引起的振动信号。 J.声音振动。 2011 , 330 , 4287–4301. [ 谷歌学者 ][ 交叉参考 ] 马查多,C。; Guessasma,M。; Bellenger,E.通过DEM进行机电建模,用于评估内部滚珠轴承负载。 机械。 机器。 理论 2015 , 92 , 338–355. [ 谷歌学者 ][ 交叉参考 ] Chevallier,E。; 伯尼,V。; Bouzerar,B。; Fortin,J。; 俄亥俄州杜兰·德鲁欣。; Da-Ros,V.作为表面状态探针的金属/金属滑动触点上的电压噪声。 J.应用。 物理学。 2014 , 115 , 1–10. [ 谷歌学者 ][ 交叉参考 ] 罗森克兰兹,A。; B.马丁。; Bettscheider,S。; 加乔特,C。; Kliem,H。; Mücklich,F.通过改进的电阻率电路测量的固体-固体接触比和润滑状态之间的相关性。 磨损 2014 , 320 , 51–61. [ 谷歌学者 ][ 交叉参考 ] Rosenkranz,A。; Heib,T。; 加乔特,C。; Mücklich,F.激光打印不锈钢表面的油膜寿命和磨损颗粒分析。 磨损 2015 , 334–335 , 1–12. [ 谷歌学者 ][ 交叉参考 ] 兰德尔,R.B。; Antoni,J.滚动元件轴承诊断-教程。 机械。 系统。 信号处理。 2011 , 25 , 485–520. [ 谷歌学者 ][ 交叉参考 ] Bourbatache,K。; Guessasma,M。; Bellenger,E。; 伯尼,V。; Fortin,J.DEM滚珠轴承模型和电气测量缺陷诊断。 机械。 系统。 信号处理。 2013 , 41 , 98–112. [ 谷歌学者 ][ 交叉参考 ] 马查多,C。; Guessasma,M。; Bellenger,E。; Bourbatache,K。; 伯尼,V。; Fortin,J.通过电气测量和数值模拟诊断轴承故障。 机械。 印度。 2014 , 15 , 383–391. [ 谷歌学者 ][ 交叉参考 ] 坎达尔,P。; Strack,O.颗粒组件的离散数值模型。 岩土工程 1979 , 29 , 47–65. [ 谷歌学者 ][ 交叉参考 ] 桑顿,C。; Randall,C.W.理论接触力学在固体颗粒系统模拟中的应用。 微型机械。 颗粒。 马特。 1988 , 20 , 133–142. [ 谷歌学者 ] 法拉,S.O。; 盖萨斯玛,M。; Bellenger,E。; Machado,C.通过DEM和使用电气测量的预测监测方法对滚珠轴承进行三维建模。 2017年11月21日至23日,阿尔及利亚康斯坦丁,第六届阿尔及利亚力学大会会议记录。 [ 谷歌学者 ] 沃尔福德,T.L.H。; Stone,B.J.摆动条件下滚动轴承的阻尼来源。 仪器机械。 工程师。 1983 , 197 , 225–232. [ 谷歌学者 ][ 交叉参考 ] Archard,J.F.弹性变形和摩擦定律。 程序。 R.Soc.伦敦。 数学。 物理学。 工程科学。 1957 , 243 , 190–205. [ 谷歌学者 ][ 交叉参考 ] Qian,W.圆柱滚子轴承的动态仿真。 2014年,德国亚琛技术学院博士论文。 [ 谷歌学者 ] Archard,J.F。; Kirk,M.T.点接触处的润滑。 程序。 R.Soc.伦敦。 数学。 物理学。 工程科学。 1962 , 261 , 532–550. [ 谷歌学者 ][ 交叉参考 ] 哈莫洛克,B。; W.安德森。 滚动轴承 ; 国家技术信息服务局出售:1983年,美国弗吉尼亚州斯普林菲尔德。 [ 谷歌学者 ] Mindlin,R。; Deresiewicz,H.变斜力下接触的弹性球体。 ASME J.应用。 机械。 1953 , 20 , 327–344. [ 谷歌学者 ] 亨特,K.H。; Crossley,F.R.E.恢复系数被解释为振动冲击中的阻尼。 J.应用。 机械。 1975 , 42 , 440–445. [ 谷歌学者 ][ 交叉参考 ] A.哈诺伊。 机械轴承设计:工程摩擦学与润滑 ; 机械工程; CRC出版社:美国佛罗里达州博卡拉顿,2002年。 [ 谷歌学者 ] 玛丽,C。; 菲利普,D。; 德沃,N。; 费洛特,N。; 劳伦特,D。; Bair,S。; Vergne,P.桥接EHL中聚合物基油溶液的高压流变性和成膜能力。 Tribol公司。 国际。 2016 , 93 ,502–510。 [ 谷歌学者 ][ 交叉参考 ] Tallian,T.E.论文14:通过润滑控制滚动接触故障。 程序。 仪器机械。 工程确认程序。 1967 , 182 , 205–236. [ 谷歌学者 ][ 交叉参考 ] 邱,M。; Chen,L。; 李毅。; 严,J。 轴承摩擦学:原理与应用 ; 施普林格:德国柏林/海德堡,2016年。 [ 谷歌学者 ] Higashi,K。; Isa,H。; 北川,T。; Onishi,T。; 大石,K。 超精加工过程的实时监控 ; 技术报告,NTN第82号; NTN公司:日本京町,2014年。 [ 谷歌学者 ] 盖根,J。; 卡迪里奇,A。; 加贝利,A。; Spikes,H。纵向粗糙度下EHD点接触中摩擦与膜厚之间的关系。 特里波尔。 莱特。 2016 , 64 , 33. [ 谷歌学者 ][ 交叉参考 ] 新墨西哥州劳伦提斯。; 卡迪里奇,A。; Lugt,P。; Cann,P.轴承润滑脂成分对滚动/滑动集中接触摩擦的影响。 特里波尔。 国际。 2016 , 94 , 624–632. [ 谷歌学者 ][ 交叉参考 ] 比约林,M。; 哈布奇,W。; Bair,S。; 拉尔森,R。; Marklund,P.朝向弹流润滑摩擦的真实预测。 特里波尔。 国际。 2013 , 66 , 19–26. [ 谷歌学者 ][ 交叉参考 ] 哈里斯,T。; Kotzalas,M。 轴承技术的先进概念 ,第5版。; 滚动轴承分析; 泰勒和弗朗西斯:阿宾顿,英国,2006年。 [ 谷歌学者 ] 道森,D。; 希金森,G。 弹性流体动力润滑 ; 国际材料科学与技术丛书; Elsevier有限公司:荷兰阿姆斯特丹,1977年。 [ 谷歌学者 ] 哈莫洛克,B。; 施密德,S。; B.雅各布森。 液膜润滑基础 ; 液膜润滑的机械工程基础; CRC出版社:美国佛罗里达州博卡拉顿,2004年。 [ 谷歌学者 ] P.卢格特。 滚动轴承的油脂润滑 ; 摩擦学实践系列; 威利:美国纽约州纽约市,2012年。 [ 谷歌学者 ]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}