Yale OpenHand Project It is an open source design scheme of mechanical arm, which encourages more changes and innovations in mechanical hardware through rapid prototyping technology. Commercial robot arms are generally very expensive, designed for some platforms, and difficult to modify.
The purpose of the project is to provide a series of open source designs, improve the design through community contributions, and provide a large number of modifications and variations based on the platform.

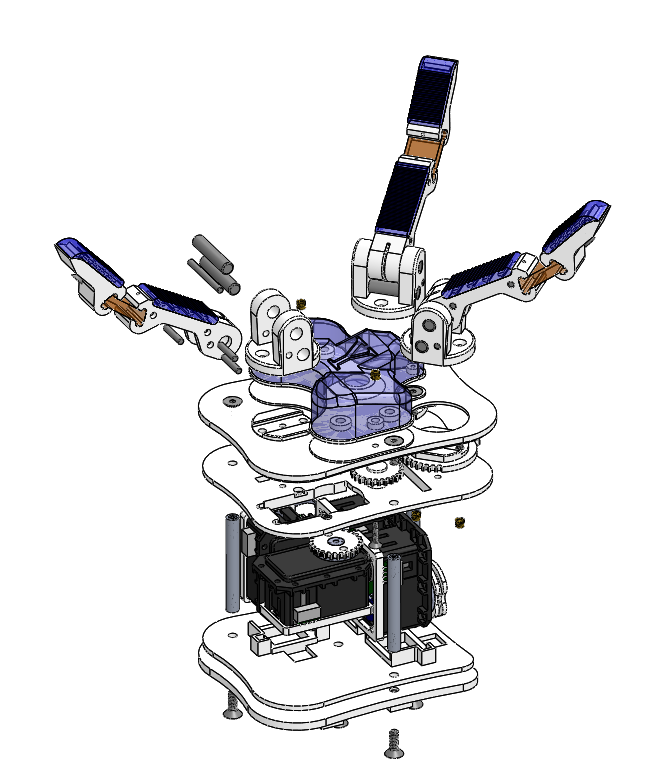
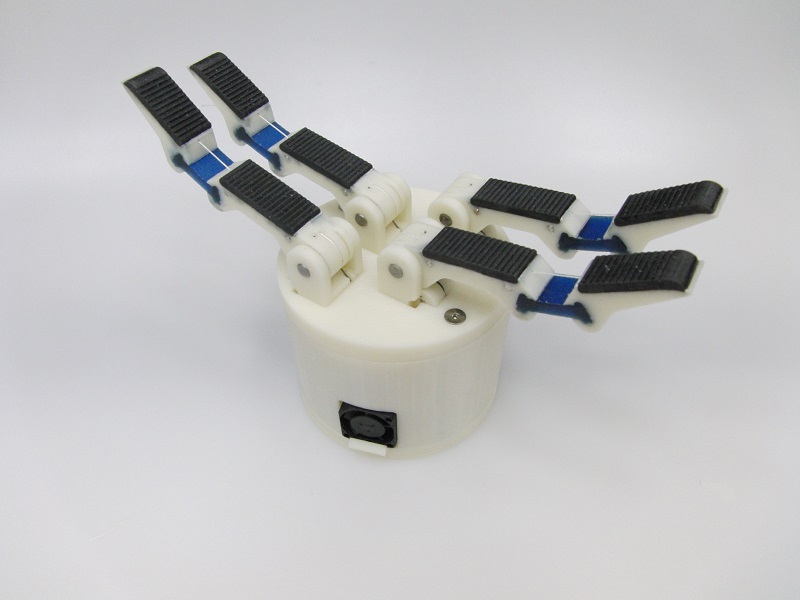
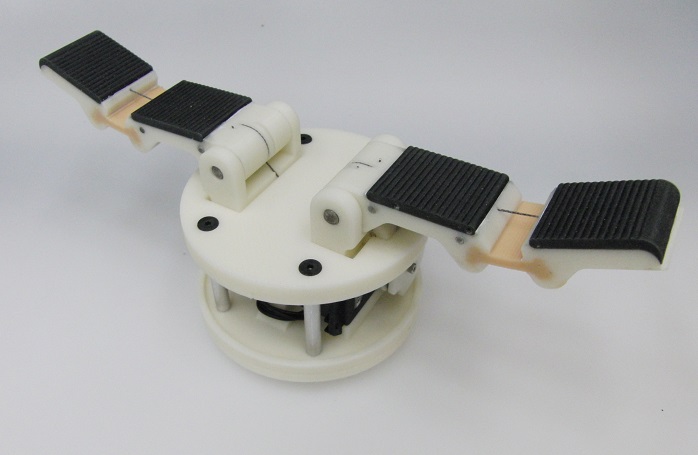
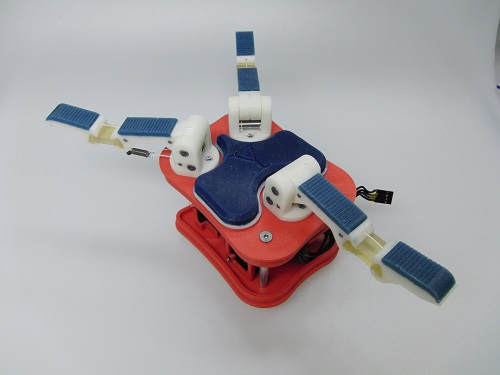
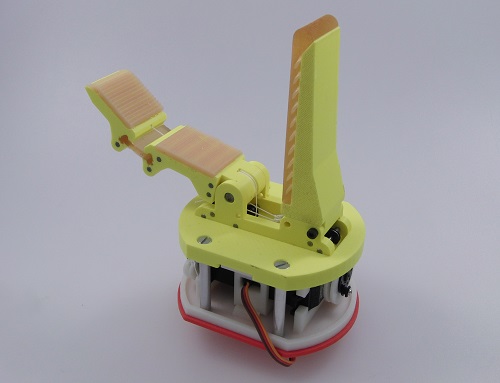
Some design cases of manipulator: