OPV2V
What is OPV2V?
-
aggregated sensor data from multi-connected automated vehicles -
73 scenes, 6 road types, 9 cities -
12K frames of LiDAR point clouds and RGB camera images, 230K annotated 3D bounding box -
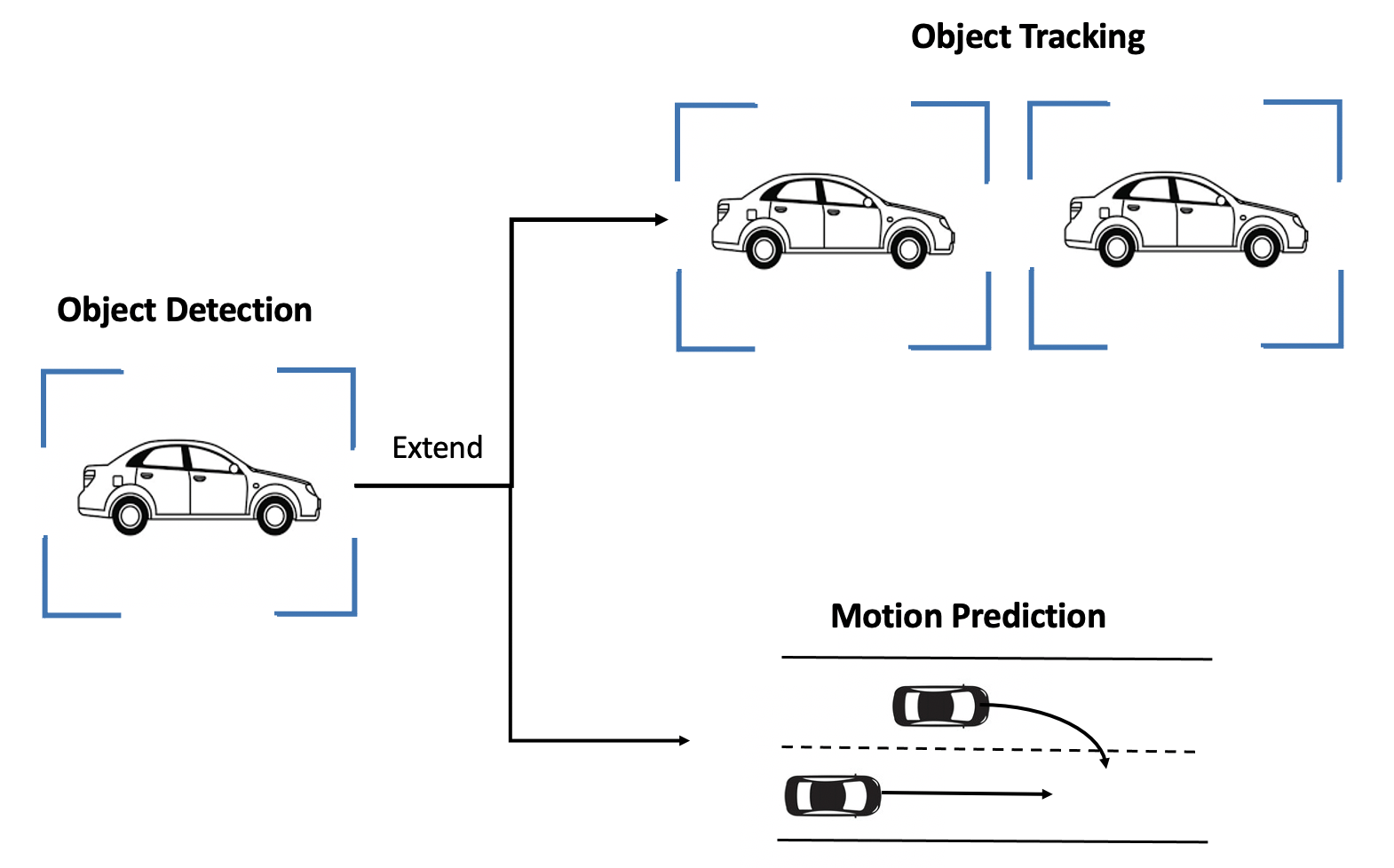
comprehensive benchmark with 4 LiDAR detectors and 4 different fusion strategies (16 models in total)
Diverse Scenes



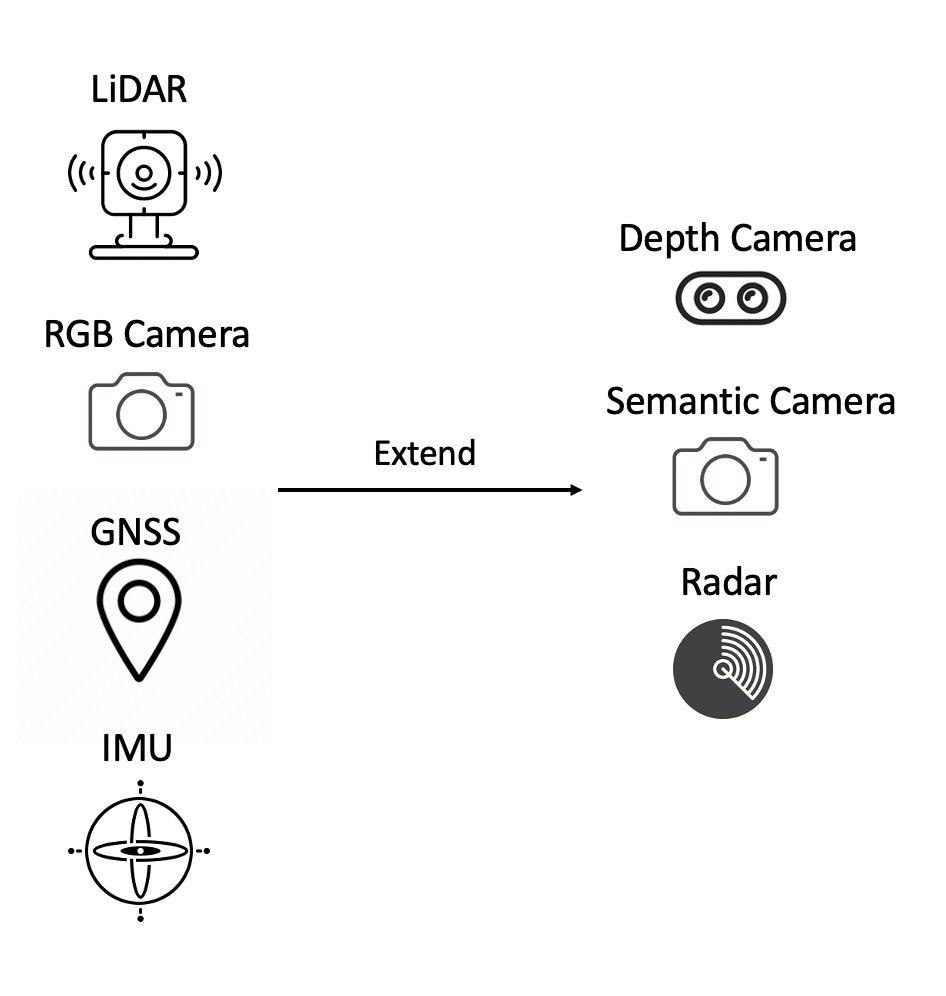
Sensor Suites
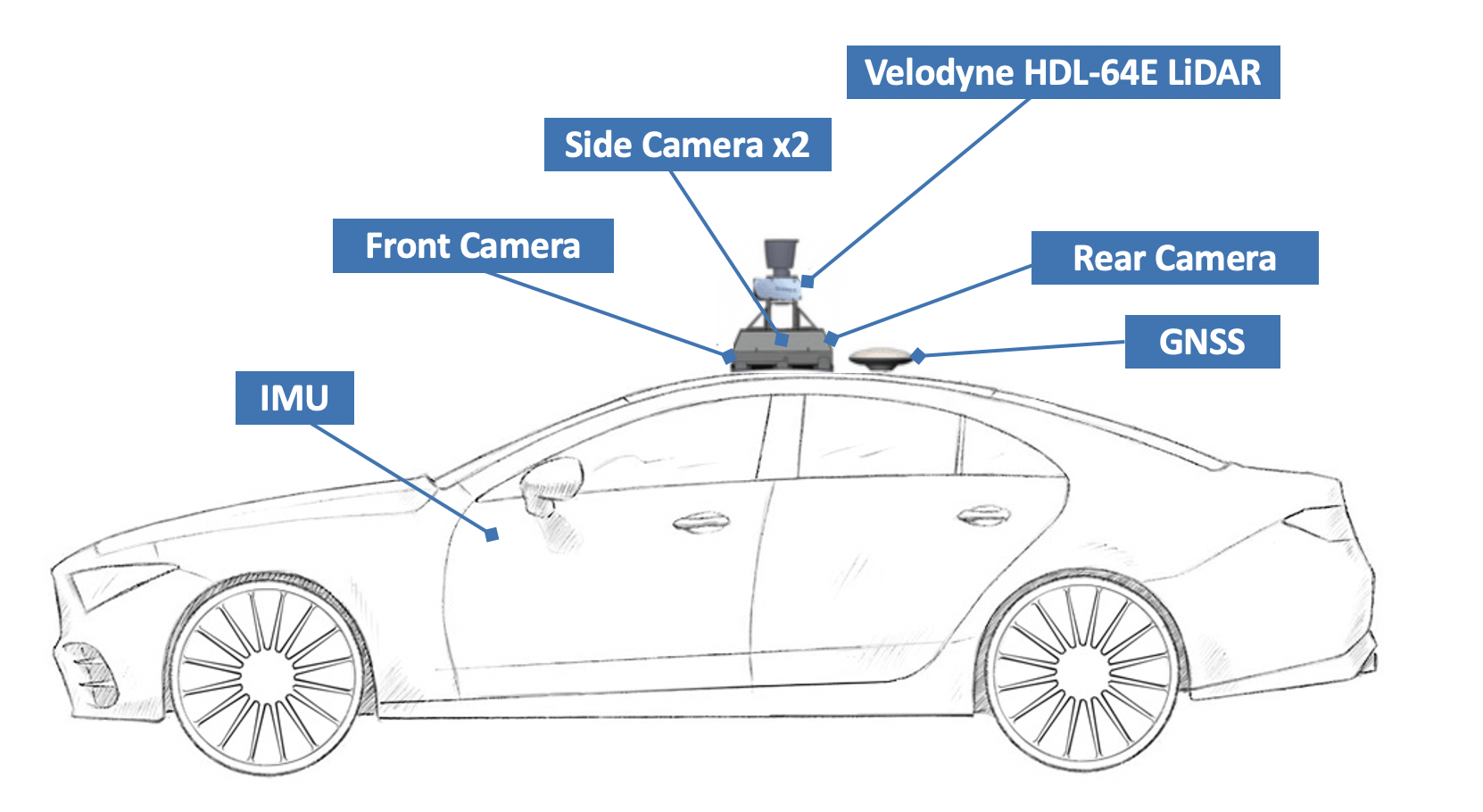
-
Lidar: 120 m detection range, 130,0000 points per second, 26.8◦ vertical
-
4x Camera: 110 ◦ FOV, 800×600 resolution
-
GNSS: 0.2m error
Extensible and Reproducible