微型地面车辆的最优跟踪控制
渡边淳一郎和原田正男
日本国防科学院
日本神奈川横须贺市哈希里米祖1-10-20号239-8686
收到:2015年6月19日认可的:2015年10月12日出版:2015年12月20日
关键词:最优控制、MGV、轨迹
摘要
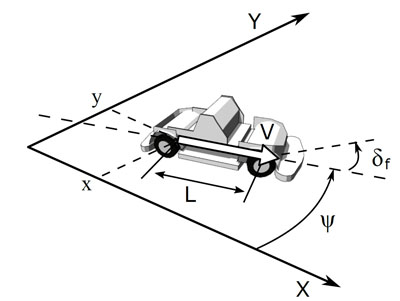 MGV坐标系
MGV坐标系- [1] T.Kobayashi和S.Majima,“通过非线性后退地平线控制实现四轮汽车的自动停车控制”,Trans。日本机械工程师学会,C辑,第70卷,第695号,第166-173页,2004年(日语)。
- [2] M.Hurni、P.Sekhavat和I.M.Ross,“使用实时信息更新的自主轨迹规划”,AIAA制导、导航和控制会议,AIAA 2008-6305,2008年。
- [3] Q.Gong,L.R.Lewis和I.M.Ross,“自主车辆的伪谱运动规划”,《制导、控制和动力学杂志》,第32卷,第3期,第1039-1045页,2009年。
- [4] S.Watanabe和M.Harada,《微型地面车辆的最佳制导和控制》,Proc。2014年JSAE年会(春季),第40-14期,第15-20页,2014年(日语)。
- [5] J.M.Maciejowski,“带约束的预测控制”,Pearson Education Limited,2002年(S.Adachi和M.Kanno译),“带限制的预测控制,”东京登基大学出版社,2005年(日语)。
- [6] T.Ohtsuka(编辑),“实时优化控制的实际应用”,科罗纳出版社,2015年(日语)。
- [7] K.Oyama和K.Nonaka,“使用时间状态控制表的非完整车辆模型预测停车控制”,2013年欧洲控制会议,第458-465页,2013年。
- [8] K.Oyama和K.Nonaka,“考虑切换点自动调整的避障模型预测停车控制”,Trans。仪表和控制工程师学会,第50卷,第1期,第9-17页,2014年(日语)。
- [9] S.Watanabe和M.Harada,“使用改进的Carathéodory-π解决方案对无人地面车辆进行实时最优反馈控制”,Proc。第页,共12页第个国际先进车辆控制研讨会,CD-ROM,第385-390页,2014年。
- [10] A.E.Bryson和Y.C.Ho,“应用最优控制”,Taylor&Francis,Levittown,1975年。
- [11] J.Z.Ben-Asher,“航空航天应用的最优控制理论”,AIAA教育系列,弗吉尼亚州,2010年。
- [12] M.Harada,“利用高阶高斯-洛巴托公式权重的Jacobi伪谱方法进行直接弹道优化”,转。日本机械工程师学会,C辑,第73卷,第728号,第119-1242007页(日语)。
- [13] M.Harada,“使用Jacobi伪谱方法对最优控制解算器进行Covector估计”,Trans。仪表与控制工程师学会,第49卷,第8期,第808-8152013页(日语)。
