动态环境下多机器人的混合路径规划与编队控制策略
孟舟、王子豪、王晶、浙东
华北工业大学电气与控制工程学院
中国北京市石景山区金源庄路5号,邮编:100144
收到:2021年12月17日认可的:2022年2月22日出版:2022年5月20日
关键词:多机器人编队控制、混合运动规划、改进的GWO-WOA算法、群智能算法、控制器设计
摘要
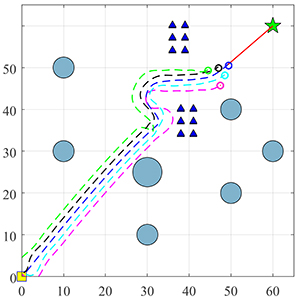
提出了一种动态环境下多机器人的混合路径规划和编队控制策略。在领导-跟随形成结构下,跟随者可以在确定领导者的路径后跟踪一个领导者的运动。首先,研究了一种包含领导者全局路径规划和局部路径规划的混合路径规划策略,其中针对给定地图中的全局路径规划设计了一种改进的混合灰狼优化算法(GWO-WOA),同时采用动态窗口法(DWA)融合用于局部路径规划,避免动态障碍。然后,针对多移动机器人,提出了一种领导-跟随编队控制算法。跟随者被控制以跟踪其相应的虚拟机器人,这些虚拟机器人是根据领导者的位置和编队生成的。最后,通过仿真实验验证了该算法在不同环境下的可行性和有效性。
编队运动规划
引用本文为:M.Zhou、Z.Wang、J.Wang和Z.Dong,“动态环境中多机器人的混合路径规划和编队控制策略”高级计算杂志。智力。智力。通知。第26卷第3期,第342-354页,2022年。数据文件:
工具书类- [1] Y.Zhao,Y.Hao,Q.Wang等人,“曲率约束多智能体系统的刚性编队控制方法”,IEEE Trans。《电路与系统II:快讯》,第68卷,第11期,第3431-34352021页。
- [2] R.Ringbäck、J.Wei、E.S.Erstorp等人,“自动水面车辆的多智能体编队跟踪”,IEEE Trans。《控制系统技术》,第29卷,第6期,第2287-2298页,2020年。
- [3] Z.Gao和G.Guo,“具有线性距离和角度约束的自主水下航行器的无速度领导-跟随编队控制”,《信息科学》,第486卷,第359-378页,2019年。
- [4] L.Yan、T.Stouraitis和S.Vijayakumar,“多机器人协作操作的分散能力感知自适应控制”,《IEEE机器人与自动化快报》,第6卷第2期,第2311-2318页,2021年。
- [5] Y.Rizk、M.Awad和E.W.Tunstel,“合作异构多机器人系统:调查”,《ACM计算调查》,第52卷,第2期,第29条,2020年。
- [6] S.-L.Dai,S.He,H.Cai等人,“具有保证性能的欠驱动地面车辆自适应领导-跟随编队控制”,IEEE Trans。《系统、人与控制论:系统》,第52卷,第3期,1997-2008页,2020年。
- [7] D.Zhou、Z.Wang和M.Schwager,“使用虚拟结构实现四驱群的敏捷协调和辅助避碰”,IEEE Trans。《机器人学》,第34卷,第4期,第916-923页,2018年。
- [8] Y.Liu和R.Bucknall,“多无人飞行器编队控制和运动规划调查”,《机器人技术》,第36卷,第7期,第1019-1047页,2018年。
- [9] K.P.Cheng,R.E.Mohan,N.H.K.Nhan等人,“基于图论的方法实现可重构机器人的完全覆盖路径规划任务”,IEEE Access,第7卷,第94642-94657页,2019年。
- [10] L.Chen,J.Mei,C.Li等人,“高阶多智能体系统的分布式领导-跟随仿射编队机动控制”,IEEE Trans。《自动控制》,第65卷,第11期,第4941-4948页,2020年。
- [11] B.S.Park和S.J.Yoo,“不确定多个非完整移动机器人的领导-跟随编队跟踪的连通性保持障碍回避方法”,《应用专家系统》,第171卷,第1145892021条。
- [12] J.Lin,Z.Miao,H.Zhong等人,“具有可见性约束的移动机器人基于图像的自适应领导-跟随编队控制”,IEEE Trans。《工业电子》,第68卷,第7期,第6010-6019页,2020年。
- [13] C.Cheng,Q.Sha,B.He等人,“AUV的路径规划和避障:综述”,《海洋工程》,第235卷,第1093552021条。
- [14] E.G.Tsardoulias、K.Iliakopoulou、A.Kargakos等人,“不考虑障碍物密度的占用栅格地图全球路径规划方法综述”,《智能与机器人系统杂志》,第84卷,第829-858页,2016年。
- [15] N.Buniyamin,W.A.J.W.Ngah,N.Sariff等人,“自治移动机器人的简单局部路径规划算法”,《系统应用、工程与开发国际期刊》,第5卷,第2期,第151-159页,2011年。
- [16] S.K.Debnath、R.Omar、S.Bagchi等人,“无人飞行器的不同单元分解路径规划方法——综述”,Proc。第11届全国无人系统技术研讨会,第99-1112021页。
- [17] H.Niu,A.Savvaris,A.Tsourdos等人,“无人水面车辆基于Voronoi可见性路线图的路径规划算法”,《航海杂志》,第72卷,第4期,第850-874页,2019年。
- [18] P.Wang,S.Gao,L.Li等人,“基于改进人工势场算法的自动驾驶车辆避障路径规划设计”,《能源》,第12卷,第12期,第2342条,2019年。
- [19] J.Wang,W.Chi,C.Li等人,“神经RRT*:基于学习的最优路径规划,“IEEE Trans。自动化科学与工程,第17卷,第4期,第1748-1758页,2020年。
- [20] W.Gao,Q.Tang,B.Ye等人,“用于移动机器人路径规划的增强启发式蚁群优化”,《软计算》,第24卷,第6139-6150页,2020年。
- [21]T.Qiuyun,S.Honyan,G.Hengwei等人,“用于AGV路径规划的改进粒子群优化算法”,IEEE Access,第9卷,第33522-335312021页。
- [22]M.Panda、B.Das和B.B.Pati,“使用GWO的多AUV全球路径规划”,《控制科学档案》,第30卷第1期,第77-100页,2020年。
- [23]Z.Yan,J.Zhang,Z.Yang等人,“使用鲸鱼优化算法的自主水下机器人二维最优路径规划”,并发与计算:实践与经验,第33卷第9期,第e61402021条。
- [24]C.Lu,L.Gao,X.Li等人,“用于数值和工程优化问题的混沌灰狼优化器”,模因计算,第12卷,第371-398页,2020年。
- [25]R.O.Lavrenov,E.A.Magid,F.Matsuno等人,“在ROS/Gazebo环境中基于样条线的路径规划算法的开发与实现”,Tr.SPIIRAN,第18卷,第1期,第57-84页,2019年。
- [26]L.Chang,L.Shan,C.Jiang等人,“未知环境下基于增强的移动机器人路径规划和改进的动态窗口方法”,《自主机器人》,第45卷,第51-76页,2021年。
- [27]L.Feng、M.Zhou和B.Hu,“动态环境中多机器人编队的混合运动规划算法”,IEEE第16届国际自动化科学与工程会议(CASE),第343-3482020页。
- [28]Z.-M.Gao和J.Zhao,“改进的变权重灰狼优化算法”,计算智能与神经科学,第2981282条,doi:https://doi.org/10.1155/2019/2981282, 2019.
- [29]W.Deng,R.Yao,H.Zhao等人,“使用优化LS-SVM和改进PSO算法的新型智能诊断方法”,《软计算》,第23卷,第2445-2462页,2019年。
- [30]H.Mohammed和T.Rashid,“用于全局数值优化和求解压力容器设计的新型混合GWO与WOA”,《神经计算与应用》,第32卷,第14701-14718页,2020年。
