摘要
1 介绍
2 前期工作
三 平衡和定性性质
定理1
证明
-
(a) \(\泽塔{-}\) , \(\泽塔{+}\) 是的最小点和最大点 \(P(x)\) 分别是。 通过简单的计算,我们得到 \(\zeta_{+}<\Pi\) 根据罗尔定理和 \(P(x)\) , \(P(x)\) 具有唯一的正实数零 \(x_{1}^{*}\ in(\zeta_{+},\Pi)\) 什么时候 \(P(\ zeta_{-})>0\) 显然,系统( 2.3 )具有独特的平衡 \(E_{1}^{(1)}:x_{1}^{*}\ in(\zeta_{+},\Pi)\) ,如图所示 1 (a) ●●●●。 图1 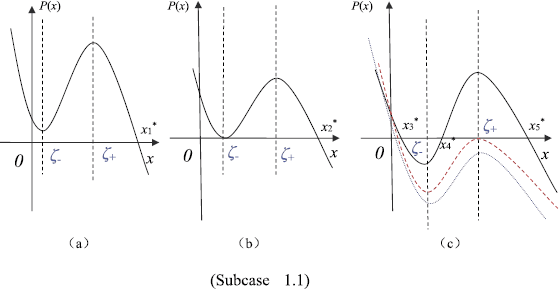
对 在子场景1.1中有一个、两个或三个零。 -
(b) \(P(x)\) 有两个正实数零 \(\泽塔{-}\) 和 \(x_{2}^{*}\ in(\zeta_{+},\Pi)\) 什么时候 \(P(泽塔{-})=0\) 然后遵循该系统( 2.3 )有两个平衡点 \(E_{2}^{(1)}:\泽塔{-}\) 和 \(E_{3}^{(1)}:x_{2}^{*}\ in(\zeta_{+},\Pi)\) ,如图所示 1 (b) ●●●●。 -
(c.1) \(P(x)\) 有三个不同的正实数零 \((0,\zeta_{-})中的x_{3}^{*},(\zeta_{-},\zeta{+})的x_}4}^{} 什么时候 \(P(泽塔{-})<0\) 和 \(P(泽塔{+})>0\) 也很明显,该系统( 2.3 )有三个平衡点 \((0,\zeta_{-})中的E_{4}^{(1)}:x_{3}^{*}) , \(E_{5}^{(1)}:x_{4}^{*}\ in(\ zeta_{-},\ zeta_{+})\) 和 \(E_{6}^{(1)}:x_{5}^{*}\ in(\ zeta_{+},\ Pi)\) ,如图所示 1 (c) ●●●●。 \(P(泽塔{-})<0,P(泽塔{+})>0\) 在实心曲线上。 -
(c.2) \(P(x)\) 有两个正实数零 \(x{6}^{*}\在(0,\zeta{-})中) 和 \(\泽塔{+}\) 什么时候 \(P(泽塔{-})<0\) 和 \(P(泽塔{+})=0\) .然后系统( 2.3 )有两个平衡点 \((0,\zeta_{-})中的E_{7}^{(1)}:x_{6}^{*}) 和 \(E_{8}^{(1)}:\zeta_{+}\) ,如图所示 1 (c) ●●●●。 \(P(泽塔{-})<0,P(泽塔{+})=0\) 在虚线曲线上。 -
(c.3) \(P(x)\) 有一个正实数零 \(x{7}^{*}\在(0,\zeta{-})中) 什么时候 \(P(泽塔{-})<0\) 和 \(P(泽塔{+})<0\) .然后是系统( 2.3 )具有独特的平衡 \((0,\zeta_{-})中的E_{9}^{(1)}:x_{7}^{*}) ,如图所示 1 (c) ●●●●。 \(P(泽塔{-})<0\) 和 \(P(泽塔{+})<0\) 在星形曲线上。


备注1
定理2
证明
备注2
4 仿真
例子



5 结论
工具书类
注意,F:感知的多重稳定性。 科学。 是。 225 , 63-71 (1971) Cohen,MA,Grossberg,S:竞争神经网络全局模式形成和并行存储的绝对稳定性。 IEEE传输。 系统。 曼赛本。 13 , 815-826 (1983) Forti,M:关于神经网络理论中出现的一类非线性系统的全局渐近稳定性。 J.差异。 埃克。 113 , 246-264 (1994) Hahnlosser,RLT:关于线性阈值神经元网络的分段分析。 神经网络。 11 , 691-697 (1998) Zeng,Z,Wang,J,Liao,X:一类具有时变时滞的递归神经网络的全局指数稳定性。 IEEE传输。 电路系统。 一、 芬丹。 理论应用。 50 (10), 1353-1358 (2003) Zeng,Z,Wang,J:延迟细胞神经网络中周期性外部输入引起的多周期和指数吸引。 神经计算。 18 (4), 848-870 (2006) Cao,J,Wang,J:一类具有时变时滞的递归神经网络的全局渐近稳定性。 IEEE传输。 电路系统。 一、 芬丹。 理论应用。 50 (1), 34-44 (2003) Chen,T,Lu,W,Chen,G:一大类广义时滞神经网络的动力学行为。 神经计算。 17 (4), 949-968 (2005) Chen,Y:延迟Cohen-Grossberg神经网络的全局渐近稳定性。 IEEE传输。 电路系统。 一、 雷古尔。 爸爸。 53 (2), 351-357 (2006) Tang,HJ,Tan,KC,Zhang,W:线性阈值神经元网络的循环动力学分析。 神经计算。 17 (1), 97-114 (2005) Zhang,L,Yi,Z,Yu,J:具有非饱和分段线性传递函数的时滞递归神经网络的多周期性和吸引性。 IEEE传输。 神经网络。 19 (1), 158-167 (2008) Zuo,Z,Yang,C,Wang,Y:一种新的区间时变时滞递归神经网络稳定性分析方法。 IEEE传输。 神经网络。 21 (2), 339-344 (2010) 张,H,王,Z,刘,D:连续时间递归神经网络稳定性分析的综合评述。 IEEE传输。 神经网络。 学习。 系统。 25 (7), 1229-1262 (2014) Li,R,Cao,J:具有时变时滞和随机发生不确定性的记忆神经网络的耗散性分析。 数学。 方法应用。 科学。 39 (11), 2896-2915 (2016) Samidurai,R,Manivannan,R:具有离散和分布式时变时滞的不确定随机神经网络的时滞范围相关无源性分析。 神经计算 185 (12), 191-201 (2016) Cheng,C,Lin,K,Shin,C:递归神经网络的多重稳定性。 SIAM J.应用。 数学。 66 (4), 1301-1320 (2006) Qu,H,Yi,Z,Wang,X:具有非饱和线性阈值传递函数的二维神经网络的切换分析。 神经计算 72 , 413-419 (2008) Manivannan,R,Mahendrakumar,G,Samidurai,R,Cao,J,Alsadei,A:具有区间时变时滞信号的广义神经网络的指数稳定性和扩展耗散性准则。 J.富兰克林研究所。 354 (11), 4353-4376 (2017) Nie,X,Cao,J:具有不连续激活函数的时滞竞争神经网络平衡点的存在性和全局稳定性。 国际期刊系统。 科学。 43 (3), 459-474 (2012) Manivannan,R,Samidurai,R,Cao,J,Alsaedi,A,Alsaadi,FE:具有时变延迟信号的广义神经网络的全局指数稳定性和耗散性。 神经网络。 87 , 149-159 (2017) Forti,M,Tesi,A:应用于线性和二次规划问题的神经网络全局稳定性的新条件。 IEEE传输。 电路系统。 一、 芬丹。 理论应用。 42 (7), 354-366 (1995) Lu,H:关于时滞非线性连续时间神经网络的稳定性。 神经网络。 13 (10), 1135-1143 (2000) Zhao,W,Zhu,Q:时滞神经网络全局鲁棒指数稳定性的新结果。 非线性分析。, 真实世界应用。 11 (2), 1190-1197 (2010) 郭,S,黄,L:Cohen-Grossberg神经网络的稳定性分析。 IEEE传输。 神经网络。 17 (1), 106-117 (2006) Wang,L:具有分布延迟的Cohen-Grossberg神经网络的稳定性。 申请。 数学。 计算。 160 (1), 93-110 (2005) Miller,RK,Michel,AN:常微分方程。 纽约学术出版社(1982) Salinas,E:背景突触活动作为网络中动态状态之间的切换。神经计算。 15 , 1439-1475 (2003) Zhang,L,Yi,Z:具有均匀发射率和背景输入的背景神经网络的动力学特性。 混沌孤子分形 33 (3), 979-985 (2007) Wan、M、Gou、J、Wang、D、Wang和X:具有均匀触发率的离散时间背景神经网络的动力学特性。 数学。 问题。 工程师。 2013 (1), 289-325 (2013) Xu,F,Yi,Z:一类具有两个子网络的简化背景神经网络的收敛性分析。 神经计算 74 (18), 3877-3883 (2011) Yi,Z,Heng,PA,Fung,PF:赢家通吃离散递归神经网络。 IEEE传输。 电路系统。 二 47 , 1584-1589 (2000) Terman,D,Rubin,JE,Yew,AC,Wilson,CJ:基底神经节丘脑下部网状结构模型中的活动模式。 神经科学杂志。 22 (7), 2963-2976 (2002) Toth,LJ,Assad,JA:顶叶皮层中行为相关刺激的动态编码。 自然 415 , 165-168 (2002) Shpiro,A,Morenobote,R,Rubin,N,Rinzel,J:感知双稳态竞争模型中噪声和适应之间的平衡。 J.计算。 神经科学。 27 (1), 37-54 (2009) Cao,J,Rakkiyappan,R,Maheswari,K,Chandrsekar,A:指数 \(H_{\infty}\) 基于逗留概率的随机时滞离散切换神经网络滤波分析。 科学。 中国,Technol。 科学。 59 (3), 387-402 (2016) Syed Ali,M,Saravanan,S,Cao,J:有限时间有界性, \(L_{2}\) -加性时变时滞马尔可夫跳变神经网络的增益分析与控制。 非线性分析。 混合系统。 23 , 27-43 (2017)
致谢
作者信息
作者和附属机构
通讯作者
其他信息
竞争性利益
作者的贡献
出版商备注
权利和权限
