摘要
1 介绍

2 材料和方法

-
第一阶段:图像数据库 为了测试提出的方法,我们使用JPG格式的CICIMAR-IPN蓝鲸图像数据库。 此数据库不是公开的,可以通过CICIMAR许可获得[ 12 ,Gendron,未发布数据]。 这些图像是在它们的自然栖息地(非受控环境)中使用不同的移动设备获取的。 我们还使用标准相机佳能EOS反射获取的图像[ 12 ]作为比较,当所提出的算法运行时,提供的工作条件和移动设备获取的图像质量不受所提出系统适用性的限制。 图 三 描述了一些RGB蓝鲸图像,这些图像是由移动设备的相机采集的:索尼Xperia J,500万像素,带LED闪光灯和自动对焦功能的相机;索尼XperiaT2,1300万像素,高清视频录制功能(1080p)的相机;三星Galaxy S4,后摄像头CMOS,1300亿像素,前摄像头,200万像素,电动LED闪光灯自动对焦, 和标准相机佳能EOS反射5毫米,带70-300远距物镜。 图3 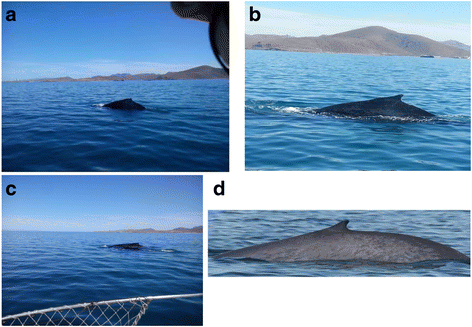
来自CICIMAR-IPN数据库的图像。 一 移动设备索尼Xperia J.获取的图像。 b条 由移动设备索尼Xperia T2获取的图像。 c(c) 图像由移动设备三星Galaxy S4采集。 d日 通过标准Cannon相机获取的图像 从RGB彩色图像中,我们分离其颜色分量(R、G、B),并在每个分量中应用所提方法的下一阶段。 我们还提到,在使用从RGB图像获得的灰度图像的情况下,直方图结果表明,组成灰度图像的对象(即海洋、天空和蓝鲸边缘)的强度之间没有太多差异,这使得分割过程更加困难。 因此,我们选择使用RGB图像的通道,其中每个通道可以提供与图像中蓝鲸的对象和/或特征有关的进一步信息,以便区分蓝鲸外部的对象和(或)边缘。 -
第二阶段:预处理 提出了一个预处理阶段,以改进和/或消除采集到的图像中与背鳍检测相关的一些特征; 其中一些特征如下:(a)姿势:蓝鲸在真实环境中获取的图像中的特征可能会因蓝鲸的处理(正面、侧面等)而发生变化,这可能导致蓝鲸的特征被遮挡,例如背鳍和色素沉着的皮肤; (b) 结构组件:场景中的海洋、天空和其他对象的形状、大小和颜色可能不同; (c) 位置:获取的图像受图像中蓝鲸的位置影响很大; (d) 遮挡:在真实环境中,蓝鲸可能被其他运动物体部分或完全遮挡; 环境条件:图像高度依赖于环境条件,如天气条件和光照强度。 在这一阶段,离散小波变换(DWT)用于描述蓝鲸图像中的纹理,因为它提供了多分辨率(MRA)分析,其空频特性在纹理分析和分类中表现出良好的精度,为图像提供了边缘和精细细节保护[ 13 , 16 ]. DWT将图像细分为几个频带,分别称为LL水平低通和垂直低通、LH水平低通与垂直高通、HL水平高通与垂直低通以及HH水平高通和垂直高通[ 13 ]. 由于圆Haar小波(CHW)具有原始图像的紧凑性和能量守恒特性,因此将其用于小波分析; 它在特征提取应用程序中简单易行[ 16 ]. CHW可以分为两种类型:边缘提取类型可以使用1D Haar小波计算,角点提取类型可以用2D Haar小波进行。 CHW的边缘提取可视为带通滤波器[ 16 ]. 在此阶段,应用1D Haar DWT进行边缘增强,然后使用2D Haar DWT来改善原始图像中蓝鲸的轮廓。 处理后的图像是在小波分解过程中从LL子带中获得的。 LL子带图像表示原始图像的低尺度,允许所提出的分割算法的处理时间显著减少。 为了说明这一阶段,将处理后的R、G和B通道组合起来,以显示最终的边缘增强RGB图像。 为了方便起见,图 4 显示了边缘增强图像的负片,以证明该方法可以改善蓝鲸背鳍和色素沉着皮肤(强度像素)的特征; 海洋、天空和其他物体也得到了改善,但它们的强度变化可以区分蓝鲸身体和其他物体的强度,从而提供更好的图像分割。 这可以通过比较原始图像和处理图像的负片图像来理解。 图4 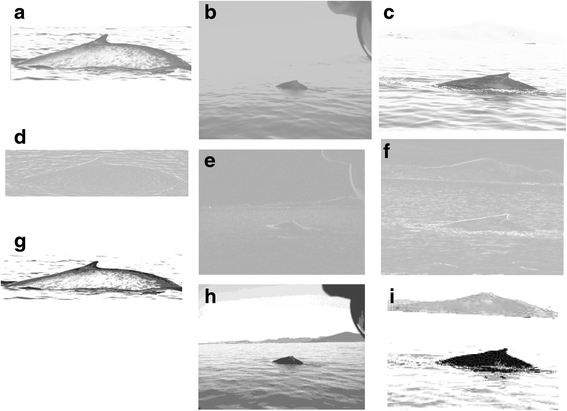
第2和第3阶段获得的视觉结果。 一 – c(c) 原始RGB图像。 d日 – (f) 预处理阶段获得的增强RGB图像。 克 – 我 在调色板还原阶段获得的量化RGB图像。 为了方便起见,这些图像被表示为负片图像 在对蓝鲸身体进行边缘增强后,使用目标检测方法在图像中找到定义背鳍轮廓的点(像素),以便通过背鳍对蓝鲸进行分类。 目标检测技术可分为两大类:基于特征的技术和基于图像的技术[ 17 ]. 基于特征的技术明确使用面部特征。 蓝鲸的明显(视觉)特性,例如皮肤颜色和背鳍几何形状,可以在蓝鲸检测期间使用。 在我们的例子中,使用标准的平移和/或旋转操作符来增强图像中定义背鳍轮廓的点(像素)。 -
第三阶段:调色板减少 图像的颜色量化是使用有限数量的颜色来表示图像的过程; 它广泛应用于图像分割、图像检索和图像压缩[ 17 ]. 其目的是尽可能接近原始的全色图像。 对于只能显示少数颜色的系统,此技术是必需的。 例如,具有8位/像素帧缓冲区的系统只能显示256色。 虽然各种现代系统都有24位/像素帧缓冲区,并且可以显示2 24 = 16777216色,颜色量化仍然适用于系统运行动画和用于高级图形应用程序的动画。 它减少了存储需求并节省了通过网络传输图像的时间[ 17 ]. 该技术用于根据视觉图像内容(在我们的例子中,蓝鲸的轮廓和背景)调整颜色数量,以在算法运行时以及在原始图像和处理图像的加载和存储要求的情况下,将移动设备的资源消耗降到最低, 降低数据传输网络的带宽[ 17 ]. 这种减少也改进了分割过程,减少了聚类部分分类不好的像素数(错误分类)。 该量化技术基于使用中值算法和标准差的局部图像复杂度估计[ 13 ]. 使用预处理阶段获得的LL子带的子图像(R、G和B),使用3×3核计算每个通道的标准偏差[ 13 ], $${\sigma}_c=\sqrt{\frac{1}{n}{\displaystyle\sum_{i=1}^n{\left( {x} _ i- \上划线{x}\右)}^2}}$$ (1) 哪里 x个 我 是的值 我 当前内核中的第个元素, \(上划线{x}=\frac{1}{n}{\displaystyle\sum{i=1}^n {x} _ i } \) 是当前内核的平均值,并且 n个 = 9是样本中元素的数量。 将用于减少调色板的准则应用于每个3×3核,以以下方式获得量化的彩色图像, $$量化=\left\{\begin{array}{ll} {x}_ {med},\hfill&{sigma}_{x_c}<T\hfill \\{} {x} c(c) ,\hfill&否则\hfill\end{数组}\right$$ (2) 其中量子化是量子化的核, x个 医学 是内核中包含的像素的中值, x个 c(c) 是内核中的中心像素, \({\sigma}{xc}\) 是中心像素的标准偏差 x个 c(c) , T型 = σ c(c) 周 (f) 是用于固定其值被认为是量化调色板的像素的阈值,以及 周 (f) = 3是RGB图像分量数的权重因子。 提出了中值算法来均匀中心像素的强度 x个 c(c) 与当前核中的邻域一起获得量化的彩色图像。 根据最佳量化结果,提出了3×3的核大小。 所提出的颜色量化方法在几次迭代中进行,停止准则为 \(\sqrt{\\left( {x} c(c)- {xq}_c \右)}^2}=0\) ,其中 x个 质量控制 是内核中的中心量化像素。 图像量化实现为当前像素和量化像素之间的减法,即零; 在我们的例子中,量化能级的数量是16。 图 4克 – 我 显示了在此阶段获得的量化RGB图像(作为负片图像)。 比较经过处理(量化)的图像(图 4克 – 我 )根据图 4 我们观察到,所提出的调色板减少方法可以限制强度的数量,以尽可能接近原始图像来表示图像,减少了存储和内存需求,并提供了更好的分割过程,避免了像素的错误分类。 对于通道R,在图 4克 ,与图中40kb的原始大小相比,减少了2kb 4a类 ,以及 小时 从图中48 kb的原始大小限制为4 kb 4b个 ; 这意味着存储和内存需求减少了90%至91.66%,这可能提供一种实时解决方案,以节省网络上的图像传输时间。 此外,通过在图的图像之间使用PSNR(峰值信噪比),量化图像的质量为22.04、30.45和27.89 dB 第4天 – (f) , 克 – 我 PSNR值表明,在我们的应用中,所提出的量化技术在处理图像中提供了最佳质量,其中量化图像似乎具有良好的主观质量。 最后,使用移动设备而不是笔记本电脑或其他计算机系统可以提供实时应用程序所需的便携性、电量消耗以及在密闭场所(如小船)的轻松操作。 -
第四阶段:自适应分割算法 图像分割是图像分析和计算机视觉中最重要的研究课题之一; 它是指将图像细分为区域(簇)的像素共享公共属性的连接区域的过程。 从CICIMAR-IPN数据库获取的图像具有不同的亮度和对比度参数,因此每个图像都呈现不同的空间和频率特征。 当标准FCM[ 15 , 18 ]和K平均值[ 14 ]算法被应用于两个数据区域(蓝鲸和背景)中的图像分割,几个像素被错误分类,导致了错误的分割,增加了这些算法的计算复杂度。 基于这些原因,我们提出了动态直方图滤波FCM(DHFCM),它考虑了图像亮度和对比度的频率直方图的变化,以在分割过程中提供更大的鲁棒性。 标准FCM定义如下[ 15 , 18 ]. 让 X(X) = { x个 1 , …, x个 n个 }是给定特征数据的集合(在我们的例子中,是蓝鲸的RGB像素强度),并让 c(c) 簇数(1< c<n )用模糊集表示 C类 j个 ( j个 = 1, …, c(c) ). 然后,我们打电话 U型 (f) = ( u个 ij公司 )模糊聚类划分 X(X) 如果 \(显示样式{\sum}_{i=1}^n {u}_ {ij}>0}\) 和 ∀ j个 ∈ {1, …, c(c) }和 \(显示样式{\sum}_{j=1}^c {u}_ {ij}=1}\) 和 ∀ 我 ∈ {1, …, n个 }保持。 给定数据集的模糊聚类模型 X(X) 进入之内 c(c) 当聚类在上述两个约束条件下使目标函数(3)最小化时,聚类被定义为最优, $$ {J} _(f) \左(X; {U} f(_f) ,C\right)={\显示样式\sum_{i=1}^n{\显示类型\sum_{j=1}^C {u}_ {ij}^m{\左\垂直 {x} _ i- {c} _j(_j) \右\垂直}^2}}$$ (3) 其中参数 m> 1是称为fuzzifier的加权指数 ‖ x个 我 − c(c) j个 ‖ 2 是与特征向量的欧几里得距离的平方 x个 我 成为全班的中心 c(c) j个 .目标函数 J型 (f) 使用参数交替优化 u个 ij公司 和 c(c) j个 (隶属度和聚类中心),通过设置 J型 (f) 关于等于零的参数(考虑到上面建立的约束)。 形成FCM算法的两个迭代步骤的结果方程如下所示:, $$ {u}_ {ij}=\压裂{{\left\Vert {x} _ i- {c} _j(_j) \right\Vert}^{-\frac{2}{m-1}}}{{\显示样式{\sum}_{k=1}^c{\left\Vert {x} _ i- {c} k(_k) \右\垂直}^{-\frac{2}{m-1}}}}$$ (4) $$ {c} _j(_j) =\frac{{\显示样式{\sum}_{i=1}^n {u}_ {ij}^m {x} _ i }}{{\显示样式{\sum}_{i=1}^n {u}_ {ij}^m}}$$ (5) 标准FCM算法(3)的目标函数没有考虑任何空间信息,使得FCM对伪影和噪声非常敏感。 为此,我们在分类过程中使用一种称为动态直方图(DH)的方法,将亮度和对比度的邻域信息纳入聚类算法中。 该算法提高了具有不同特征的图像的亮度和对比度,这些图像的直方图呈不变的高斯分布, $$\mathrm{D}\mathrm{H}={\theta}_{DH}=\left\{begin{array}{l}{overline{x}}_D,\kern1em {x} _ i \le{\overline{x}}_d\kern0.5em\mathrm{和}\kern05em{\mathrm{cov}}_{XY}<0\\{} {x} _ i ,\kern1em\mathrm{否则}\end{array}\right$$ (6) 哪里 \({上划线{x}}_d=\frac{1}{n}{\displaystyle\sum{i=1}^n {x} _ i } \) 是3×1滑动窗口中的平均值, \({\operatorname{cov}}_{XY}=\frac{1}{n}{\displaystyle\sum_{i-1}^n\Big( {x} _ i }-\上划线{x}\大)\左( {y} _ i- \上划线{y}\右)\) 是协方差, x个 我 代表 我 -滑动窗构件, 年 我 表示直方图中的当前元素, \(\上划线{y}\) 表示直方图的平均值,以及 n个 = 三。 平均值和协方差值显示了使用该标准的滑动窗口中强度值的线性相关性(6)。 因此,根据DH的分布,图像中的高亮度和对比度值被一致的值所改变。 因此,我们可以说,所提出的DH算法消除了采集图像中高对比度光照值引起的脉冲噪声。 然后,我们可以使用提出的DH作为标准FCM算法像素的亮度和对比度的估计器,以改进由于图像中呈现的不同结构成分和环境条件而导致的分割过程。 在此基础上,我们可以将建议的DHFCM中要最小化的新目标函数定义为, $$ {J} g(_g) \左({\varTheta}_{\mathrm{DH}}; {U} f(_f) ,C\right)={\显示样式\sum_{i=1}^n{\显示类型\sum_{j=1}^C {u}_ {ij}^m{\left\Vert{\theta}_{\mathrm{DH}}- {c} _j(_j) \右\垂直}^2}}$$ (7) 哪里 Θ DH(决断高度) = { θ DH(决断高度) |1, …, n个 }是一个向量,DH估计器应用于图像的强度特征向量。 由于坡度 J型 克 关于 u个 ij公司 和 c(c) j个 当达到局部最优时消失,并且考虑到目标函数最小化的条件,很容易证明 U型 (f) 和 C类 由给出, $$ {u}_ {qj}=\frac{{left\Vert{theta}_{mathrm{DH}}- {c} _j(_j) \right\Vert}^{-\frac{2}{m-1}}}{{\displaystyle{\sum}_{l=1}^c{\left\Vert{\theta}_{\mathrm{DH}}- {c} _l(l) \右\垂直}^{-\frac{2}{m-1}}}}$$ (8) $$ {c} _j(_j) =\frac{{\显示样式{\sum}_{i=1}^n {u}_ {ij}^m{theta}_{\mathrm{DH}}}}}{\displaystyle{\sum}_{i=1}^n {u}_ {ij}^m}}$$ (9) 建议的DHFCM算法的参数设置为 米 = 聚类部分的ε=1e−4(随机初始化)。 我们找到了最大迭代次数的最佳参数 T型 = 20; 它是从不同分割图像的迭代平均值中获得的,以确定接近阈值ε=1e−4的最佳值。簇数 c(c) 取决于要分割的图像,但在我们的示例中,它被设置为2(蓝鲸和背景)。 最后,提出的分割方法只使用常量,使得该方法对于该应用程序来说简单、高效且可行。 为了减少聚类部分(分割阶段)分类不好的像素数,我们建议将所提出的DH方法与标准K-means聚类算法结合使用。 这种新方法称为动态直方图K-means(DHKM)。 K均值的理论基础可以在[ 14 ]. 最后,图 5 显示了通道R中的分割结果(图 5a级 – c(c) )使用标准KM、标准FCM和建议的DHFCM,可以看出,与标准方法相比,建议的方法似乎具有更好的主观质量。 -
阶段5:最大限度地减少分类错误的像素数量。 从RGB图像中,独立R、G和B通道的分割结果可能具有不同的像素,这些像素的值在其他簇中分类不正确,从而在三个通道之间提供了不正确的分割。 因此,我们将这三个分量的分割图像组合在一起,使最终的分割图像具有单个灰度分量,以以下方式尽可能避免像素的不良分类, $$final \ segmented \ kern0.5em image=\ frac{R+G+B}{3}$$ (10) 哪里 R(右) , G公司 ,以及 B类 分别是在通道R、G和B的图像中获得的分割。 应用以下准则获得最终的二值分割图像,其中只有两个簇(背景为黑色,蓝鲸为白色), $$binary\image=\left\{\begin{array} {ll}1 ,\hfill&final\segmented\kern0.5em图像<{\sigma}_c\hfill \\{}0,\hfirl&otherwill\end{array}\right$$ (11) 哪里 最终分割图像 从(10)和 σ c(c) 是在3×3滑动窗口中计算的标准偏差(等式( 1 )). 图 5天 – (f) 显示了 二进制图像 它分别表示标准KM、标准FCM和建议的DHFCM分割算法的最终分割。 从图中可以看出,提出的算法(见图 第5页 )与标准方法相比,显示出更好的主观质量。 我们观察到,图中的像素分类不好 5厘米 在这一阶段进行了纠正,为蓝鲸和背景提供了良好的分类。 最后,利用二值图像的结果,我们可以获得原始图像中蓝鲸及其背鳍的轮廓、边缘和特征,以便将这些数据用于分类过程。



三 结果


4 讨论
5 结论
工具书类
KA Walker、AW Trites、M Haulena、DM Weary,《不同标记和标记技术对海洋哺乳动物影响的综述》。 威尔德。 物件。 39 , 15–30 (2012). http://dx.doi.org/ 10.1071/WR10177 RG Harcourt、E Turner、A Hall、JR Wass、M Hindell,捕获压力对自由活动、繁殖活跃的雄性威德尔海豹的影响。 J.公司。 生理学。 神经乙醇。 感觉神经。 行为。 生理学。 196 , 147–154 (2010). 数字对象标识: 2007年10月7日/00359-009-0501-0 CJA Bradshaw、RJ Barker、LS David,新西兰毛皮海豹幼崽标签丢失建模。 农业杂志。 生物环境。 斯达。 5 (4), 475–485 (2000). 数字对象标识: 10.2307/1400661 CW Speed,MG Meekan,CJA Bradshaw,使用信息理论找出匹配的野生动物照片识别。 前面。 Zool(动物园)。 4 (2), 1–11 (2007). 数字对象标识: 10.1186/1742-9994-4-2 Whitehead H.,《精子鲸豚的计算机辅助个体识别》,主编:Hammond P.S.、Mizroch S.A.和Donovan G.P.,第12期,第71-78页,(1990年) MJ Kelly,使用个人识别进行研究的计算机辅助照片匹配:塞伦盖蒂猎豹的一个例子。 哺乳动物杂志。 82 (2), 440–449 (2001). 数字对象标识: 10.1644/1545-1542(2001)082<0440:CAPMIS>2.0 S Shrestha、KB Shah、D Bista、HS Baral,《个体小熊猫的摄影鉴定》(Ailurus fulgens Cuvier,1825)。 申请。 生态。 环境。 科学。 三 (1), 11–15 (2015). DOI:10.12691/aees-3-1-3.9 GR Hillman,Bürsig,GA Gailey,N Kehtarnavaz,A Drobyshevsky,BN Araabi,HD Tagare,《计算机辅助海洋脊椎动物个体光识别:多物种系统》。 水上运动。 哺乳动物。 j。 29 (1), 117–123 (2003). 数字对象标识: 10.1578/016754203101023960 J Alessi,M Aïssi,C Fiori,地中海西北部抹香鲸的照片鉴定:对自然标记的评估。 水上运动。 保存。 3月弗莱什瓦特。 生态系统。 24 (1), 11–22 (2014). 数字对象标识: 10.1002/aqc.2427.11 SK Katona、B Baxter、O Brazier、S Kraus、J Perkins、H Whitehead,通过侥幸照片识别座头鲸。 行为。 海洋动物。 三 , 33–44 (1979). 数字对象标识: 10.1007/978-1-4684-2985-5_2.11 E Niest、D Burns、P Harrison、Fluke matcher:座头鲸计算机辅助匹配系统( 巨翅目 )侥幸。 3月7日。 科学。 26 (3), 744–756 (2010). 数字对象标识: 10.1111/j.1748-7692.2009.00368.x号 D Gendron,A Ugalde De La Cruz,简化蓝鲸照片识别技术的新分类方法。 鲸类资源管理杂志。 12 (1), 79–84 (2012) BE Carvajal-Gamez,FJ Gallegos-Funes,AJ Rosales-Silva,基于颜色局部复杂度估计的隐写术(CLCES)方法。 专家系统。 应用。 40 , 1132–1142 (2013). 数字对象标识: 2016年10月10日/j.eswa.2012.08.024 AK Jain,《数据聚类:超越K-means 50年》。 模式识别。 利特。 31 , 651–666 (2010). 数字对象标识: 2016年10月10日/j.patrec.2009.09.011 F Zhao,J Fan,H Liu,基于最优选择的带自校正非局部空间信息的抑制模糊C均值聚类算法,用于图像分割。 专家系统。 应用。 41 , 4083–4093 (2014). 数字对象标识: 2016年10月10日/j.eswa.2014.01.003 M Honma,T Nose,S Sato,用于沿任意方向提取边缘特征的光学Haar小波。 选择。 修订版。 7 (一) 2000年9月至13日。 数字对象标识: 10.1007/s10043-000-0009-x L Wu-Ja,L Ja-Chen,通过保留颜色分布特征进行颜色量化。 信号。 过程。 78 , 201–214 (1999). 数字对象标识: 10.1016/S0165-1684(99)00060-2 D Müjica-Vargas,F Gallegos-Funes,A Rosales-Silva,J De Jesus Rubio,用于彩色图像分割的鲁棒c-原型算法。 EURASIP j.图像。 视频。 过程。 63 , 1–12 (2013). 数字对象标识: 10.1186/1687-5281-2013-63 A Fathi,A Naghsh-Nilchi,基于小波的视网膜血管自动分割和血管直径估计。 生物识别。 信号处理。 控制 8 , 71–80 (2013). 数字对象标识: 10.1016/j.bspc.2012.05.005 RM Aliguliyev,基于密度的聚类方法的性能评估。 通知。 科学。 179 , 3583–3602 (2009). 数字对象标识: 10.1016/j.ins.2009.06.012 D Faraggi,B Reiser,ROC曲线下面积的估算。 统计医学。 21 , 3093–3106 (2002) Yurkov A.O.,ChernukhaI。 V.,《鲸鱼的自动识别和识别,控制论的理论和应用方面》,59-69,(2015),ISBN 978-966-399-702-5 S.Hale,DARWIN中从数字照片中自动提取海豚背鳍轮廓的无监督阈值,高级论文,2008
致谢
基金
作者的贡献
竞争性利益
作者信息
作者和附属机构
通讯作者
权利和权限
