开发商
主页
博客
论坛
文件
下载
培训
搜索
加入
驱动器
2024年1月29日
用全卷积网络仿真变压器模型中的注意机制
在过去十年中,计算机视觉(CV)任务中采用深度学习技术的人数激增。
卷积神经网络(CNN)。。。
13最小读数
用全卷积网络仿真变压器模型中的注意机制
2023年12月18日
用地道英语教授汽车驾驶行为语言
驾驶员之间的沟通大多不限于转向灯和刹车灯。
移动另一辆车继续行驶,查看是否有其他驾驶员。。。
5分钟读数
用Trajeglish教授AVs人类驾驶行为语言
2023年12月5日
利用自我监督学习重构动态驾驶场景
从单调的高速公路到例行的社区旅行,开车往往是平安无事的。
因此,许多自动驾驶汽车(AV)的训练数据。。。
6最小读数
利用自我监督学习重构动态驾驶场景
2023年11月28日
用双层模拟学习人工智能模型模拟真实交通行为
从最后一刻的切入到即兴的180度大转弯,人类司机可能是令人难以置信的不可预测。
这种不可预测性源于人类复杂的本性。。。
5分钟读数
用双层模拟学习人工智能模型模拟真实交通行为
2023年11月13日
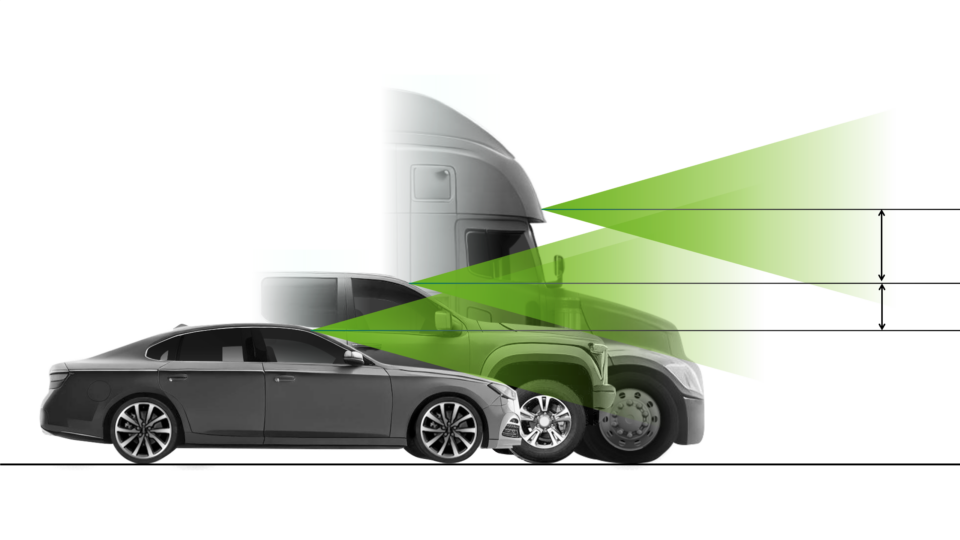
使用合成数据解决自动车辆感知的新观点
自动车辆(AV)有各种形状和尺寸,从小型客车到多轴半卡车。
然而,部署在……上的感知算法。。。
7最小读数
使用合成数据解决自动车辆感知的新观点
2023年9月27日
免费课程:开发Omniverse工具包应用程序的要点
参加这个免费的自定进度课程,学习如何利用NVIDIA Omniverse Kit在Omnivers平台上轻松构建应用程序。
1最小读数
免费课程:开发Omniverse工具包应用程序的要点
2023年9月26日
验证NVIDIA DRIVE Sim雷达型号
传感器仿真是解决自动车辆(AV)开发中实际数据差距的关键工具。
然而,只有当传感器。。。
15分钟读数
验证NVIDIA DRIVE Sim雷达型号
2023年8月31日
使用cuDLA在NVIDIA Jetson Orin上部署YOLOv5:量化感知训练到推理
NVIDIA Jetson Orin是用于AI工作负载的最佳嵌入式平台。
Orin平台的关键组件之一是第二代Deep。。。
11最小读数
使用cuDLA在NVIDIA Jetson Orin上部署YOLOv5:量化感知训练到推理
2023年7月27日
利用神经激光雷达场感知自动驾驶汽车仿真的新前沿
自主车辆(AV)开发需要大量传感器数据用于感知开发。
开发人员通常从两个。。。
6最小读数
用神经激光雷达场探测新边界用于自主车辆仿真
2023年7月12日
基于早期网格融合的近距离障碍感知
当感知障碍物时,自动泊车辅助必须克服一些独特的挑战。
自我车辆包含感知周围环境的传感器。。。
5分钟读数
基于早期网格融合的近距离障碍感知
2023年5月18日
利用合成数据聚焦远场目标,实现基于摄像头的AV感知
探测远场物体,例如100米以外的车辆,是自动驾驶系统在操作时安全操纵的基础。。。
7最小读数
利用合成数据聚焦远场目标,实现基于摄像头的AV感知
2023年3月13日
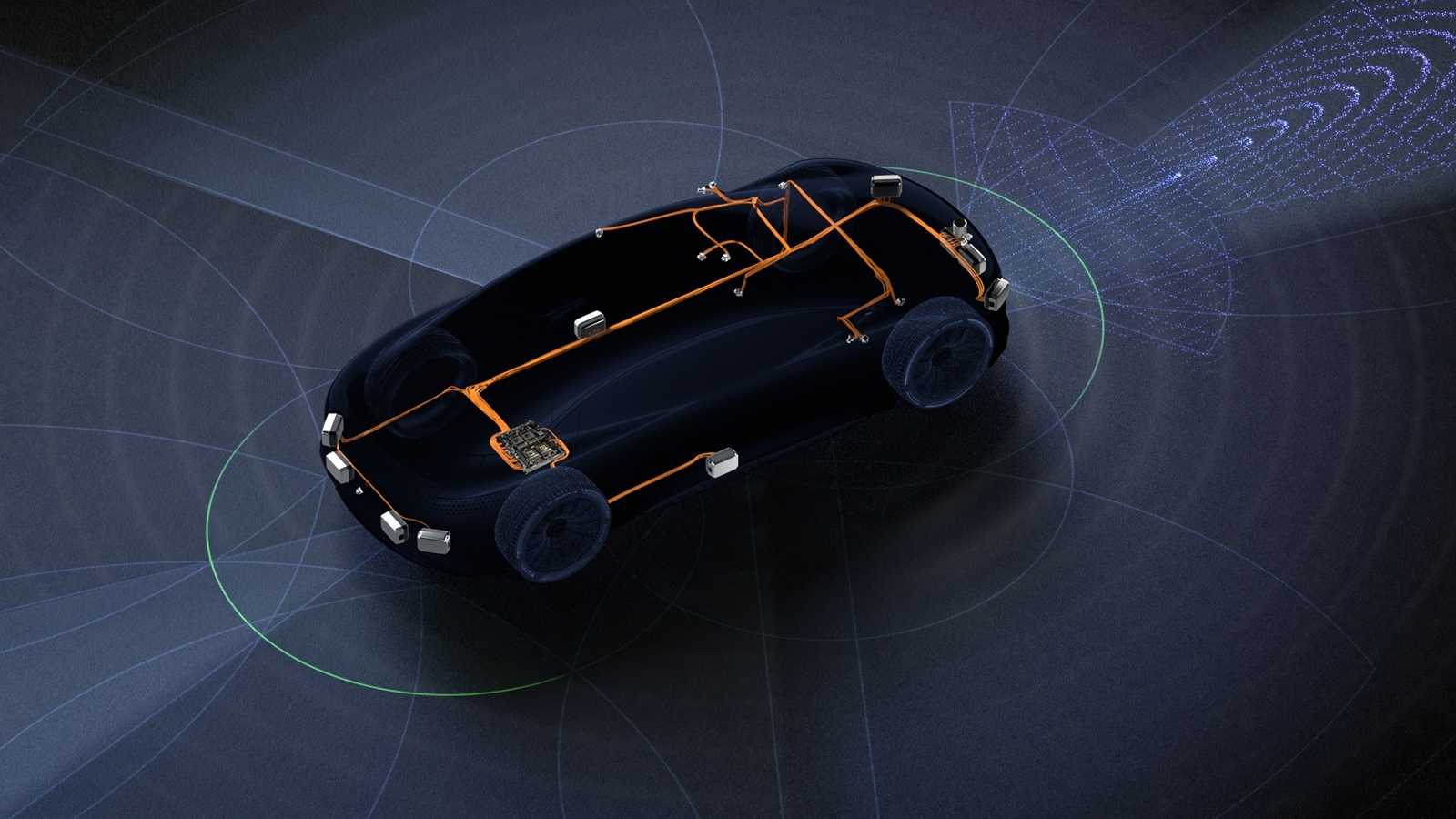
利用RadarNet探测障碍物和可行驶自由空间
检测可驾驶自由空间是高级驾驶员辅助系统(ADAS)和自动车辆(AV)感知的关键组成部分。
障碍物检测是。。。
6最小读数
利用RadarNet探测障碍物和可行驶自由空间
2023年2月23日
自动驾驶汽车基于人工智能的潜在事故场景生成
自动车辆(AV)必须能够安全处理现实世界中可能遇到的任何类型的交通情况。
这包括危险。。。
4最小读数
自动驾驶汽车基于人工智能的潜在事故场景生成
2023年1月20日
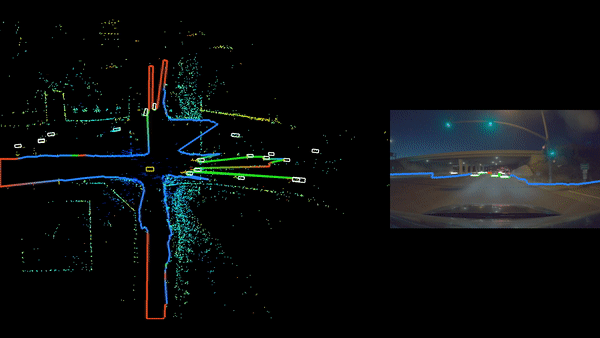
验证NVIDIA DRIVE Sim激光雷达型号
自主汽车的发展完全是规模问题。
工程师必须收集并标记大量数据来训练自驱动神经网络。
这个。。。
2最小读数
验证NVIDIA DRIVE Sim激光雷达模型
2023年1月12日
解说员:二级和五级自主有什么区别?
为了确定实现完全自治的途径,美国汽车工程师学会(也称为SAE国际)详细介绍了六类。。。
1最小读数
解说员:二级和五级自主有什么区别?
2023年1月10日
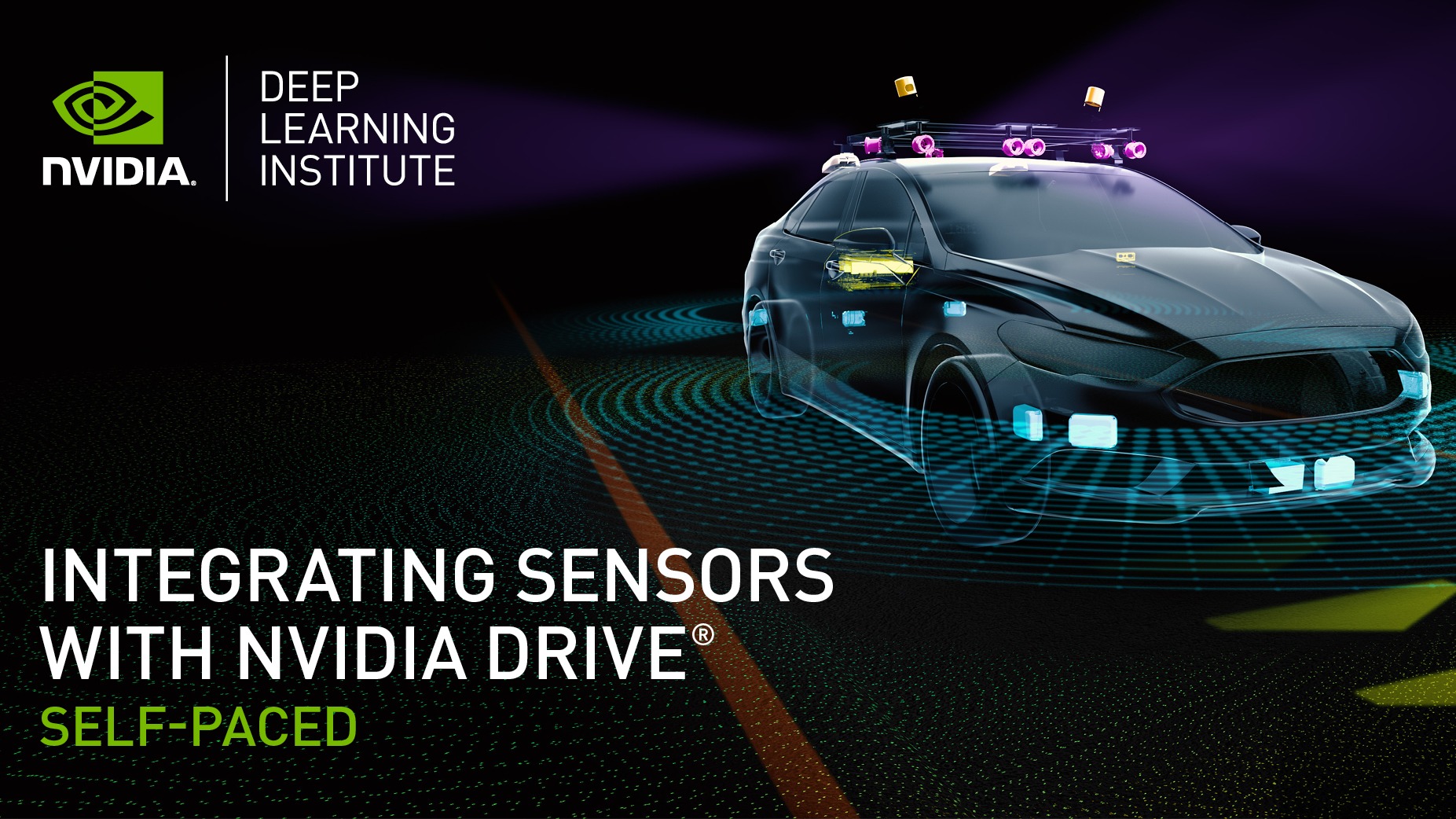
更新课程:将传感器与NVIDIA DRIVE集成
了解如何为NVIDIA DRIVE集成您选择的传感器。
此更新的自定进度课程现在使用DriveWorks 5.8,并包括激光雷达示例。
1最小读数
更新课程:将传感器与NVIDIA DRIVE集成
加载更多