摘要
在这个项目中,我通过使用不同的统计方法、可视化算法和特征提取技术来分析n体仿真输出及其模式。使用n体模拟随机生成技术,可以生成5000个不同输出的样本。通过执行特征提取过程,在二维特征空间图上绘制了一些关于模拟的不同结果的有趣可视化。利用质量中心分布和双体质量可视化技术得出了其他结论。
介绍
在物理学和天文学中,N体模拟是对粒子动力学系统的模拟,通常受到物理力(例如重力)的影响。目前,计算能力足以处理某些类别的N-Body模拟,其中包含少量实体,且延迟时间较短。对于天文单位和千兆年等现实单位的情况,计算机无法处理其复杂性。为了避免这种计算复杂性的困难,诸如“平方反比”之类的系统相对论地将公制单位和无单位量在数学上等价。
这里有一些随机n体模拟的例子,它们具有非常混乱的行为,并且很容易在初始状态上稍作调整就改变输出。
CreateRandomBody[]:=块[{},<|“Mass”->RandomReal[{0.01,0.99}],“Position”->RandomReal[{-1,1},2],“Velocity”->RandomReal[{-1,1},2]|>]CreateRandomPivot[]:=块[{},<|“质量”->1,“位置”->{0,0},“速度”->RandomReal[{-0.25,0.25},2]|>]NBodyPlot[data_]:=参数图[Evaluate[data[All,“Position”,t]],{t,0,data[“SimulationTime”]},纵横比->自动,轴->假,PlotStyle->{厚度[0.025],厚度[0.025m],厚度+0.025]}]表[光栅化[NBody图[NBody仿真[“平方反比”,{CreateRandomPivot[],CreateRandomBody[],CreateRandomBody[]},10]],ImageSize->Small],8]//安静

要执行相同的可视化和过程,请下载本文中提供的笔记本。笔记本包含您需要的所有数据集和文件。
启发式数据=“…”;NBParameters=“…”;NBDPaths=“…”;
“启发式数据”列表包含由“NBodyHeuristics”函数生成的启发式结果列表(请参阅“数据生成过程”),“NBParameters”列表包含初始参数列表,“NBDPath”列表包含实体的最终路径列表。每个列表都是统一的,每个列表包含5000个元素。
NBParametersDataset=数据集@NBParameters;{NBPBodyA,NBPBody B,NBPBondy C}=表格[NBParametersDataset[[All,t]],{t,1,3}];{allDoubleFalse、allSingleFalse、pivotDiverged、allContained、allDivergent}=表[Join@@Position[HeuristicData,t],{t{{假,真,假}|{假}}];{所有双错误点、所有单错误点、全部包含点、所有分叉点、数据透视分叉点}=表[Thread[{Normal[NBPBodyB[x,“Mass”]],Normal[NBABodyC[x,”Mass“]}],{x,{allDoubleFalse,allSingleFalse,all Contained,allDivergent,pivotDiverged}}];ListPlot[{allContainedPoints,allDivergentPoints,pivotDivergedPoints,All DoubleFalsePoints},PlotStyle->{RGBColor[0.9,0.9,0.9],{PointSize[0.01],Blue},{PointSize[001],Red},}PointSize[20.01],Orange},AspectRatio->Automatic,PlotTheme->“Detailed”,PlotLegends->{“All Bodyes Contained”,“All bodyes Diverged”,“Pivot Divered”,“两个不同的物体”},PlotLabel->“最轻物体的质量和稳定性”,LabelStyle->{16,GrayLevel[0]},ImageSize->{500,500}]
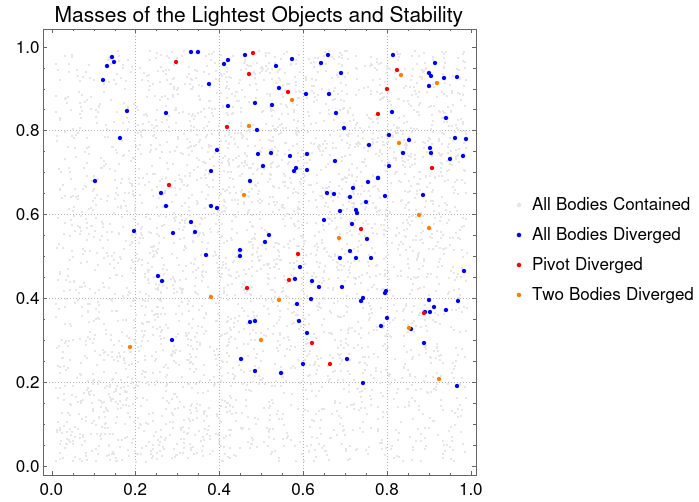
通过这张图,我们可以直观地看到,较轻物体的质量与系统的稳定性之间存在关联。最轻的物体在模拟中最稳定,这意味着它们不会从系统中“弹射”出来。
现在,让我们用$\frac{\sum_{i=j}^nm_ix_i}{\sum_{i=j}^nm_i}$计算质心之间的距离,$m_i$是单个物体的质量,$x_i$作为空间中的位置。
centerOfMass=线程〔{Normal@NBParametersDataset〔〔All,All,“Mass”〕,NBDPaths}〕;centerOfMasses=表格[(centerOf Mass[[n]][[1]]*centerOf2 Mass[[n]][2]]//总计)/总计[centerOF Mass[[2]]],{n,1,Length[NBParametersDataset]}];distancesCOM=映射线程[表[EuclideanDistance[#1,#2[[n]]],{n,1,3}]&,{centerOfMasses,NBDPaths}];直方图[Flatten@distancesCOM,PlotLabel->“重心到物体的距离之和[Unitless]”,LabelStyle->{16,GrayLevel[0]},PlotTheme->“详细”,ColorFunction->Function[{height},RGBColor[0,1*height,1],ImageSize->{750500}]
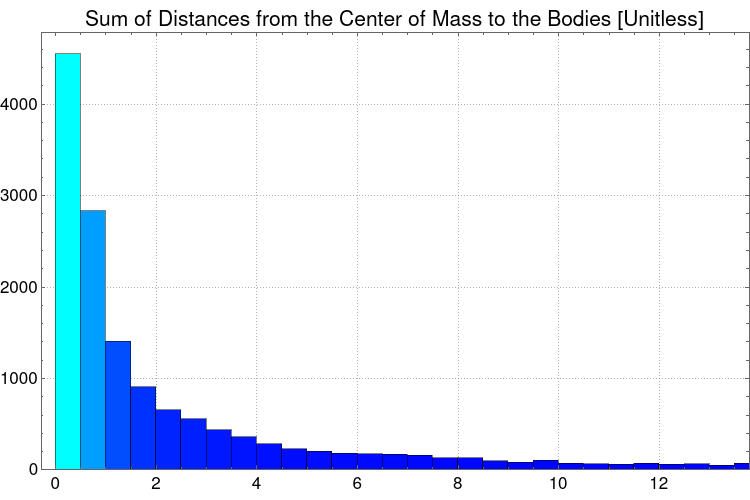
这个直方图清楚地表明,从质量中心到物体的距离有一条对数曲线,事实上对数正态分布[]可以使用匹配分布查找分布[].
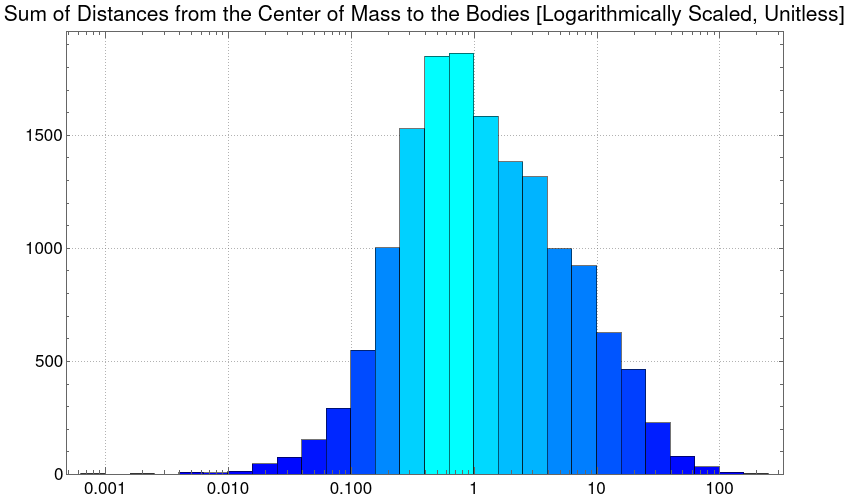
并且,通过用对数标度绘制直方图,我们获得了正态分布。
直方图[扁平@距离COM,{“日志”,20},绘图标签->“从质心到物体的距离总和\[对数缩放,无单位]“,标签样式->{16,灰度[0]},PlotTheme->“详细”,ColorFunction->函数[{height},RGB颜色[0,1*height,1]],图像大小->{850,500}]
一个有趣的可视化是FeatureSpacePlot所有模拟的光栅化。这将给我们一个有趣的视角来观察模拟的更大画面。
rasterizeList=Rasterize[NBodyPlot[NBodySimulation[“Inverse Square”,#,10]]//@Normal[RandomSample[NBParametersDataset,250]]//安静;FeatureSpacePlot[rasterizeList[[1;;200]],LabelingSize->30,ImageSize->{800,800},PlotLabel->“250个三体仿真的特征空间”,LabelStyle->{16,GrayLevel[0]}]
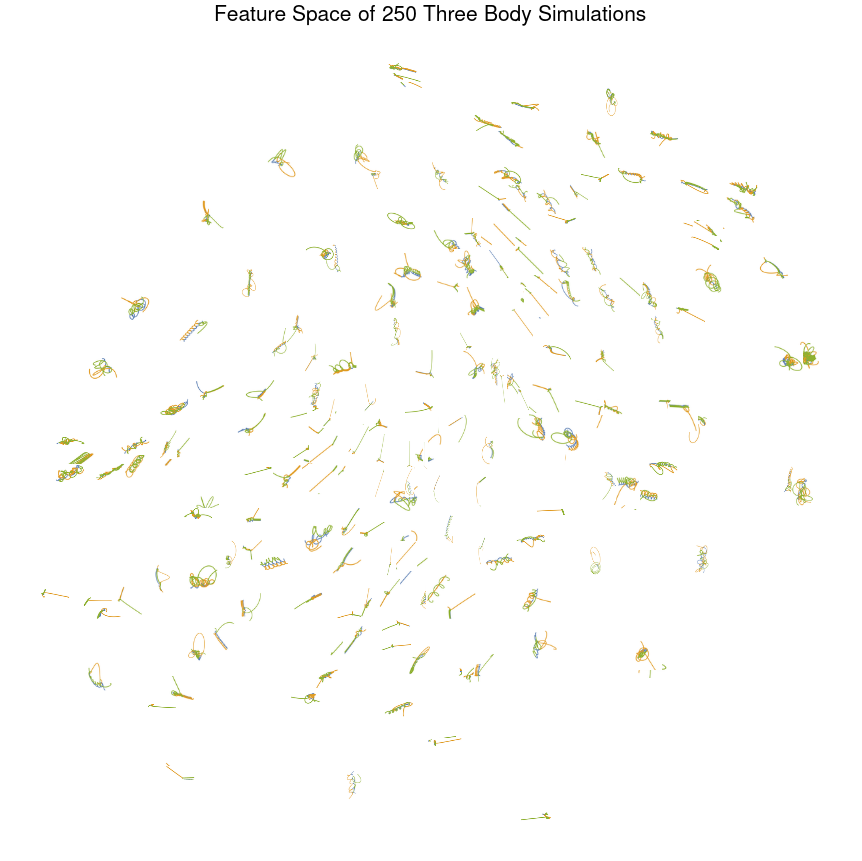
基于此功能空间图[],我们可以推断出,大多数混沌模拟都位于边界上,而发散模拟总是在物体发散的一侧。
结论
在本项目中,我的结论是,由于n体模拟的混沌特性,神经网络和聚类分类等算法的适用性很难实现,此类系统的波动性不允许进行分类。在图形和分布中可以实现一些推断,例如在较低质量下的稳定性,以及系统的接近质心。
一个有趣的研究扩展是对更大的系统进行同样的分析,例如五体问题。在一个更健壮的计算机中,可以进行更多的模拟,并且可以设想更清晰的相关性和曲线。
[可选]如何生成数据
为了生成本项目中使用的所有数据,可以执行这些单元格,请注意,本节是一个附录,没有必要,因为本日志中已经包含了5000个示例数据。
batchPath=笔记本目录[]{generatedData,heuristicData,nbdpathsData,bodyData,bodisData}=表格[{},{5}];NBodyHeuristics[positionsList_,maxSpace_:8]:=块[{emptyList={},车身A=位置列表[1],车身B=位置列表[2],车身C=位置列表[[3]]},如果[maxSpace>=bodyA[[1]>=-maxSpace\[And]maxSpace>=bodyA[[2]>=-maxSpace,emptyList=联接[emptyList,{True}],emptyList=联接[空列表,{False}]];如果[maxSpace>=bodyB[[1]]>=-maxSpace\[And]maxSpace>=bodyB[2]]>=-maxSpace,emptyList=联接[emptyList,{True}],emptyList=联接[空列表,{False}]];如果[maxSpace>=bodyC[[1]]>=-maxSpace\[And]maxSpace>=bodyC[2]]>=-maxSpace,emptyList=联接[emptyList,{True}],emptyList=联接[空列表,{False}]];返回[emptyList];]GenerateNBodySimulations[nsimulations_,time_]:=执行[AbortProtect[PrintTemporary[Style[“\[DoubleRightArrow]”,15,橙色],“”,“生成”,动态[Length[heuristic Data]],“”,样式[“NBodySimulations”,橙色],“”,进度指示器[外观->“渗透”,图像大小->{60,20}]];bodyData={CreateRandomPivot[],CreateRandomBody[],创建RandomBody[]};generatedData=NBodySimulation[“平方反比”,bodyData,time]//安静;heuristicData=Append[heuristic Data,NBodyHeuristics[generatedData[All,“Position”,generatedData[“SimulationTime”]]];nbdpathsData=Append[nbdpatssData,generatedData[All,“Position”,generated Data[“SimulationTime”]]];bodysData=附加[bodysData,bodyData];清除所有[generatedData,bodyData],刺激];GenerateNBodySimulations公司[100,10]导出[batchPath<>“HeuristicData_”<>ToString[batchCounter]<>“.mx”,HeuristicData];导出[batchPath<>“NBDPaths_”<>ToString[batchCounter]<>“.mx”,nbdpathsData];导出[batchPath<>“NBParameters_”<>ToString[batchCounter]<>“.mx”,bodysData];{generatedData,heuristicData,nbdpathsData,bodyData,bodisData}=表格[{},{5}];batchCounter++;
 附件:
附件:

