ORB-SLAM2:用于单目、立体和RGB-D相机的开源SLAM系统
@文章{MurArtal2016ORBSLAM2AO, title={ORB-SLAM2:单目、立体和RGB-D相机的开源SLAM系统}, author={劳尔·穆尔·阿尔塔和胡安·塔尔}, journal={IEEE机器人学报}, 年份={2016年}, 体积={33}, 页码={1255-1262}, url={https://api.semanticscholar.org/CorpusID:206775640} }









4529引文
ORB-SLAM3:用于视觉、视觉-惯性和多映射SLAM的精确开源库
2021
ORB-SLAM2S:一种具有稀疏光流跟踪的快速ORB-SLAME2系统
2021
MD-SLAM:多用户直接SLAM
2022
结构PLP-SLAM:单目、RGB-D和立体相机使用点、线和平面的高效稀疏映射和定位
2023
Direct-ORB-SLAM:直接单目ORB-SLAN
2019
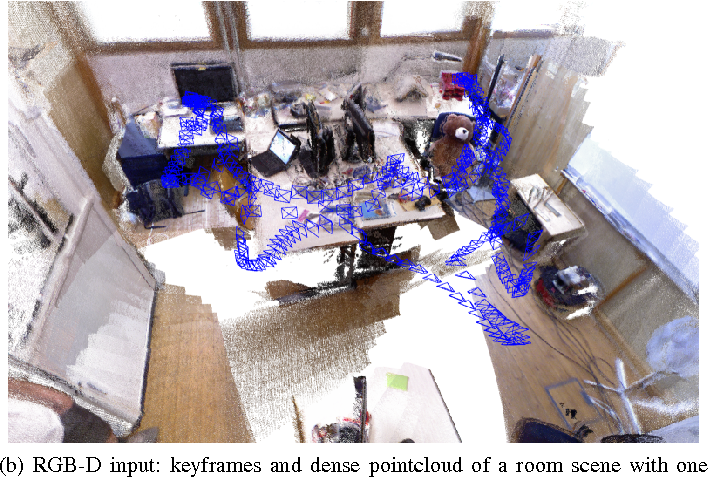
RGB-D相机鲁棒、精确的同步定位与制图系统
2018
基于ORB-SLAM3扩展的深度相机实时跟踪和三维密集重建
2023
使用全向摄像机的精确且稳健的单目SLAM
2019
24参考文献
ORB-SLAM:一种通用且精确的单眼SLAM系统
2015
大尺寸六自由度SLAM,带立体声耳机
2008
带有立体摄像头的大规模直接SLAM
2015
规模漂移器大型单目SLAM
2010
具有体积融合的实时大规模密集RGB-D SLAM
2015
RGB-D摄像机的密集视觉SLAM
2013
ElasticFusion:实时密集SLAM和光源估计
2016