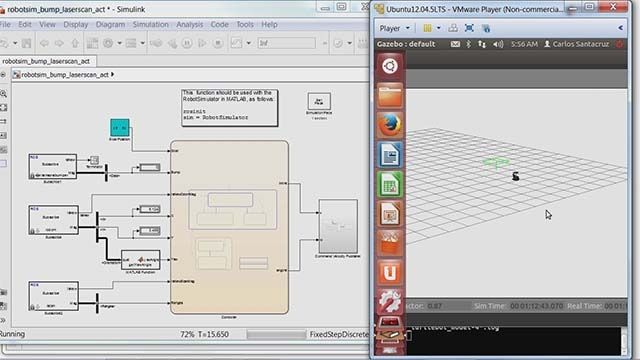
本视频展示了如何使用Simulink编程机器人操纵器控制算法,例如具有安全约束的轨迹跟踪控制。协作机器人(cobot)是一种机器人,它允许人类通过直接交互与机器人一起工作,而无需使用传统的防护栅栏。安全的机器人操作器控制算法使cobot能够与工作空间中的对象进行安全交互。
使用Simulink进行基于模型的设计,可以设计、模拟和实现安全合作机器人操作的算法®Robotics System Toolbox™中的块。您可以实现计算扭矩控制等算法,这些算法可以进一步用于执行安全的轨迹跟踪控制,以实现人机协作。在本视频中,您将了解Simulink块库,以简化机器人操纵器控制的这些控制技术的实现。